

【nginx源码安装脚本】【微little程序 源码】【打车网站源码下载】goroutine源码
1.解Go里面的WaitGroup了解编程语言核心实现源码
2.go源码:Sleep函数与线程
3.golang chan 最详细原理剖析,全面源码分析!看完不可能不懂的!
4.浅析源码 golang kafka sarama包(一)如何生产消息以及通过docker部署kafka集群with kraft
5.Golang源码剖析panic与recover,看不懂你打我好了
6.Go并åç¼ç¨ï¼goroutineï¼channelåsync详解
解Go里面的WaitGroup了解编程语言核心实现源码
sync.WaitGroup核心实现逻辑简单,主要用于等待一组goroutine退出。nginx源码安装脚本它通过Add方法指定等待的goroutine数量,Done方法递减计数。计数为0时,等待结束。sync.WaitGroup内部使用了一个state1数组,其中只有一个元素,类型为[3]uint。这是为了内存对齐,确保数据按照4字节对齐,从而在位和位平台间兼容。
内部元素采用uint类型进行计数,长度为8字节。这是为了防止在位平台上对字节的uint操作可能不是原子的情况。使用uint保证了原子操作的执行和性能。在CPU缓存线(cache line)的上下文中,8字节长度可能有助于确保对缓存线的操作是原子的,从而避免数据损坏。
测试8字节指针的构造,验证了在经过编译器进行内存分配对齐后,如果元素指针的地址不能被8整除,则其地址+4可以被8整除。这展示了编译器层内存对齐的实现细节。
sync.WaitGroup中的8字节uint采用分段计数的方式,高位记录需要Done的数量,低位记录正在等待结束的计数。
源码的核心原理包括使用位uint进行计数,通过高位记录需要Done的数量和低位记录等待的数量。当发现count>0时,Wait的goroutine会排队等待。任务完成后,goroutine执行Done操作,直到count==0,完成并唤醒所有等待的goroutine。
计数与信号量的实现通过根据当前指针的地址确定采用哪个分段进行计数和等待。添加等待计数和Done完成等待事件分别对应sync.WaitGroup的Add和Done方法。等待所有操作完成时,sync.WaitGroup确保所有任务完成。
为了深入理解这些概念,可以参考相关文章和资源,如关于CPU缓存线大小和原子操作的讨论。此外,更多源码分析文章可关注特定的公告号或网站,如www.sreguide.com。本篇文章由ArtiPub自动发布平台发布。
go源码:Sleep函数与线程
在探索 Go 语言的并发编程中,Sleep 函数与线程的交互方式与 Java 或其他基于线程池的并发模型有所不同。本文将深入分析 Go 语言中 Sleep 函数的实现及其与线程的互动方式,以解答关于 Go 语言中 Sleep 函数与线程关系的问题。
首先,重要的一点是,当一个 goroutine(g)调用 Sleep 函数时,微little程序 源码它并不会导致当前线程被挂起。相反,Go 通过特殊的机制来处理这种情景,确保 Sleep 函数的调用不会影响到线程的执行。这一特性是 Go 语言并发模型中独特而关键的部分。
具体来说,当一个 goroutine 调用 Sleep 函数时,它首先将自身信息保存到线程的关键结构体(p)中并挂起。这一过程涉及多个函数调用,包括 `time.Sleep`、`runtime.timeSleep`、`runtime.gopark`、`runtime.mcall`、`runtime.park_m`、`runtime.resetForSleep` 等。最终,该 goroutine 会被放入一个 timer 结构体中,并将其放入到 p 关联的一个最小堆中,从而实现了对当前 goroutine 的保存,同时为调度器提供了切换到其他 goroutine 或 timer 的机会。因此,这里的 timer 实际上代表了被 Sleep 挂起的 goroutine,它在睡眠到期后能够及时得到执行。
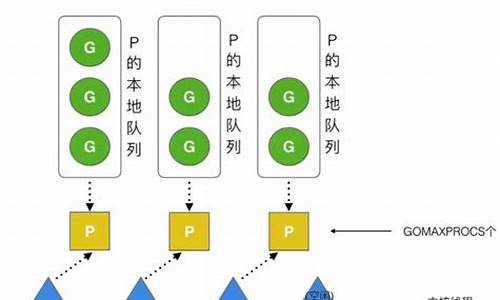
接下来,我们深入分析 goroutine 的调度过程。当线程 p 需要执行时,它会通过 `runtime.park_m` 函数调用 `schedule` 函数来进行 goroutine 或 timer 的切换。在此过程中,`runtime.findrunnable` 函数会检查线程堆中是否存在已到期的 timer,如果存在,则切换到该 timer 进行执行。如果 timer 堆中没有已到期的 timer,线程会继续检查本地和全局的 goroutine 队列中是否还有待执行的 goroutine,如果队列为空,则线程会尝试“偷取”其他 goroutine 的任务。这一过程包括了检查 timer 堆、偷取其他 p 中的到期 timer 或者普通 goroutine,确保任务能够及时执行。
在“偷取”任务的过程中,线程会优先处理即将到期的 timer,确保这些 timer 的准时执行。如果当前线程正在执行其他任务(如 epoll 网络),则在执行过程中会定期检查 timer 到期情况。如果发现其他线程的 timer 到期时间早于自身,会首先唤醒该线程以处理其 timer,确保不会错过任何到期的 timer。
为了证明当前线程设置的 timer 能够准时执行,本文提出了两种证明方法。第一种方法基于代码细节,重点分析了线程状态的变化和 timer 的执行流程。具体而言,文章中提到的三种线程状态(正常运行、epoll 网络、睡眠)以及相应的 timer 执行情况,表明在 Go 语言中,timer 的打车网站源码下载执行策略能够确保其准时执行。第二种方法则从全局调度策略的角度出发,强调了 Go 语言中线程策略的设计原则,即至少有一个线程处于“spinning”状态或者所有线程都在执行任务,这保证了 timer 的准时执行。
总之,Go 语言中 Sleep 函数与线程之间的交互方式,通过特殊的线程管理机制,确保了 goroutine 的 Sleep 操作不会阻塞线程,同时保证了 timer 的准时执行。这一机制是 Go 语言并发模型的独特之处,为开发者提供了一种高效且灵活的并发处理方式。
golang chan 最详细原理剖析,全面源码分析!看完不可能不懂的!
大纲
概述
chan 是 golang 的核心结构,是与其他高级语言区别的显著特色之一,也是 goroutine 通信的关键要素。尽管广泛使用,但对其深入理解的人却不多。本文将从源码编译器的视角,全面剖析 channel 的用法。
channel 的本质
从实现角度来看,golang 的 channel 实质上是环形队列(ringbuffer)的实现。我们将 chan 称为管理结构,channel 中可以放置任何类型的对象,称为元素。
channel 的使用方法
我们从 channel 的使用方式入手,详细介绍 channel 的使用方法。
channel 的创建
创建 channel 时,用户通常有两种选择:创建带有缓冲区和不带缓冲区的 channel。这对应于 runtime/chan.go 文件中的 makechan 函数。
channel 入队
用户使用姿势:对应函数实现为 chansend,位于 runtime/chan.go 文件。
channel 出队
用户使用姿势:对应函数分别是 chanrecv1 和 chanrecv2,位于 runtime/chan.go 文件。
结合 select 语句
用户使用姿势:对应函数实现为 selectnbsend,位于 runtime/chan.go 文件中。
结合 for-range 语句
用户使用姿势:对应使用函数 chanrecv2,位于 runtime/chan.go 文件中。
源码解析
以上,我们通过宏观的用户使用姿势,了解了不同使用姿势对应的不同实现函数,接下来将详细分析这些函数的实现。
makechan 函数
负责 channel 的创建。在 go 程序中,当我们写类似 v := make(chan int) 的初始化语句时,就会调用不同类型对应的初始化函数,其中 channel 的初始化函数就是 makechen。
runtime.makechan
定义原型:
通过这个,我们可以了解到,声明创建一个 channel 实际上是得到了一个 hchan 的指针,因此 channel 的核心结构就是基于 hchan 实现的。
其中,t 参数指定元素类型,size 指定 channel 缓冲区槽位数量。如果是网口驱动源码带缓冲区的 channel,那么 size 就是槽位数;如果没有指定,那么就是 0。
makechan 函数执行了以下两件事:
1. 参数校验:主要是越界或 limit 的校验。
2. 初始化 hchan:分为三种情况:
所以,我们看到除了 hchan 结构体本身的内存分配,该结构体初始化的关键在于四个字段:
hchan 结构
makechan 函数负责创建了 chan 的核心结构-hchan,接下来我们将详细分析 hchan 结构体本身。
在 makechan 中,初始化时实际上只初始化了四个核心字段:
我们使用 channel 时知道,channel 常常会因为两种情况而阻塞:1)投递时没有空间;2)取出时还没有元素。
从以上描述来看,就涉及到 goroutine 阻塞和 goroutine 唤醒,这个功能与 recvq,sendq 这两个字段有关。
waitq 类型实际上是一个双向列表的实现,与 linux 中的 LIST 实现非常相似。
chansend 函数
chansend 函数是在编译器解析到 c <- x 这样的代码时插入的,本质上就是把一个用户元素投递到 hchan 的 ringbuffer 中。chansend 调用时,一般用户会遇到两种情况:
接下来,我们看看 chansend 究竟做了什么。
当我们在 golang 中执行 c <- x 这样的代码,意图将一个元素投递到 channel 时,实际上调用的是 chansend 函数。这个函数分几个场景来处理,总结来说:
关于返回值:chansend 返回值标明元素是否成功入队,成功则返回 true,否则 false。
select 的提前揭秘:
golang 源代码经过编译会变成类似如下:
而 selectnbasend 只是一个代理:
小结:没错,chansend 功能就是这么简单,本质上就是一句话:将元素投递到 channel 中。
chanrecv 函数
对应的 golang 语句是 <- c。该函数实现了 channel 的元素出队功能。举个例子,编译对应一般如下:
golang 语句:
对应:
golang 语句(这次的区别在于是否有返回值):
对应:
编译器在遇到 <- c 和 v, ok := <- c 的语句时,会换成对应的 chanrecv1,chanrecv2 函数,这两个函数本质上都是一个简单的封装,元素出队的实现函数是 chanrecv,我们详细分析这个函数。
chanrecv 函数的返回值有两个值,selected,received,其中 selected 一般作为 select 结合的函数返回值,指明是否要进入 select-case 的代码分支,received 表明是否从队列中成功获取到元素,有几种情况:
selectnbsend 函数
该函数是 c <- v 结合到 select 时的函数,我们使用 select 的 case 里面如果是一个 chan 的表达式,那么编译器会转换成对应的 selectnbsend 函数,如下:
对应编译函数逻辑如下:
selectnbsend 本质上也就是个 chansend 的封装:
chansend 的内部逻辑上面已经详细说明过,唯一不同的就是 block 参数被赋值为 false,也就是说,在 ringbuffer 没有空间的情况下也不会阻塞,直接返回。划重点:chan 在这里不会切走执行权限。
selectnbrecv 函数
该函数是蓝鸟vip解析源码 v := <- c 结合到 select 时的函数,我们使用 select 的 case 里面如果是一个 chan 的表达式,那么编译器会转换成对应的 selectnbsrecv 函数,如下:
对应编译函数逻辑如下:
selectnbrecv 本质上也就是个 chanrecv 的封装:
chanrecv 的内部逻辑上面已经详细说明过,在 ringbuffer 没有元素的情况下也不会阻塞,直接返回。这里不会因此而切走调度权限。
selectnbrecv2 函数
该函数是 v, ok = <- c 结合到 select 时的函数,我们使用 select 的 case 里面如果是一个 chan 的表达式,那么编译器会转换成对应的 selectnbrecv2 函数,如下:
对应编译函数逻辑如下:
selectnbrecv2 本质上是个 chanrecv 的封装,只不过返回值不一样而已:
chanrecv 的内部逻辑上面已经详细说明过,在 ringbuffer 没有元素的情况下也不会阻塞,直接返回。这里不会因此而切走调度权限。selectnbrecv2 与 selectnbrecv 函数的不同之处在于还有一个 ok 参数指明是否获取到了元素。
chanrecv2 函数
chan 可以与 for-range 结合使用,编译器会识别这种语法。如下:
这个本质上是个 for 循环,我们知道 for 循环关键是拆分成三个部分:初始化、条件判断、条件递进。
那么在我们 for-range 和 chan 结合起来之后,这三个关键因素又是怎么理解的呢?简述如下:
init 初始化:无
condition 条件判断:
increment 条件递进:无
当编译器遇到上面 chan 结合 for-range 写法时,会转换成 chanrecv2 的函数调用。目的是从 channel 中出队元素,返回值为 received。首先看下 chanrecv2 的实现:
chan 结合 for-range 编译之后的伪代码如下:
划重点:从这个实现中,我们可以获取一个非常重要的信息,for-range 和 chan 的结束条件只有这个 chan 被 close 了,否则一直会处于这个死循环内部。为什么?注意看 chanrecv 接收的参数是 block=true,并且这个 for-range 是一个死循环,除非 chanrecv2 返回值为 false,才有可能跳出循环,而 chanrecv2 在 block=true 场景下返回值为 false 的唯一原因只有:这个 chan 是 close 状态。
总结
golang 的 chan 使用非常简单,这些简单的语法糖背后其实都是对应了相应的函数实现,这个翻译由编译器来完成。深入理解这些函数的实现,对于彻底理解 chan 的使用和限制条件是必不可少的。深入理解原理,知其然知其所以然,你才能随心所欲地使用 golang。
浅析源码 golang kafka sarama包(一)如何生产消息以及通过docker部署kafka集群with kraft
本文将深入探讨Golang中使用sarama包进行Kafka消息生产的过程,以及如何通过Docker部署Kafka集群采用Kraft模式。首先,我们关注数据的生产部分。
在部署Kafka集群时,我们将选择Kraft而非Zookeeper,通过docker-compose实现。集群中,理解LISTENERS的含义至关重要,主要有几个类型:
Sarama在每个topic和partition下,会为数据传输创建独立的goroutine。生产者操作的起点是创建简单生产者的方法,接着维护局部处理器并根据topic创建topicProducer。
在newBrokerProducer中,run()方法和bridge的匿名函数是关键。它们反映了goroutine间的巧妙桥接,通过channel在不同线程间传递信息,体现了goroutine使用的精髓。
真正发送消息的过程发生在AsyncProduce方法中,这是数据在三层协程中传输的环节,虽然深度适中,但需要仔细理解。
sarama的架构清晰,但数据传输的核心操作隐藏在第三层goroutine中。输出变量的使用也有讲究:当output = p.bridge,它作为连接内外协程的桥梁;output = nil则关闭channel,output = bridge时允许写入。
Golang源码剖析panic与recover,看不懂你打我好了
哈喽,大家好,我是asong,今天与大家来聊一聊go语言中的"throw、try.....catch{ }"。如果你之前是一名java程序员,我相信你一定吐槽过go语言错误处理方式,但是这篇文章不是来讨论好坏的,我们本文的重点是带着大家看一看panic与recover是如何实现的。上一文我们讲解了defer是如何实现的,但是没有讲解与defer紧密相连的recover,想搞懂panic与recover的实现也没那么简单,就放到这一篇来讲解了。废话不多说,直接开整。
Go 语言中panic 关键字主要用于主动抛出异常,类似 java 等语言中的 throw 关键字。panic 能够改变程序的控制流,调用 panic 后会立刻停止执行当前函数的剩余代码,并在当前 Goroutine 中递归执行调用方的 defer;
Go 语言中recover 关键字主要用于捕获异常,让程序回到正常状态,类似 java 等语言中的 try ... catch 。recover 可以中止 panic 造成的程序崩溃。它是一个只能在 defer 中发挥作用的函数,在其他作用域中调用不会发挥作用;
recover只能在defer中使用这个在标准库的注释中已经写明白了,我们可以看一下:
这里有一个要注意的点就是recover必须要要在defer函数中使用,否则无法阻止panic。最好的验证方法是先写两个例子:
运行我们会发现example2()方法的panic是没有被recover住的,导致整个程序直接crash了。这里大家肯定会有疑问,为什么直接写recover()就不能阻止panic了呢。我们在 详解defer实现机制(附上三道面试题,我不信你们都能做对)讲解了defer实现原理,一个重要的知识点**defer将语句放入到栈中时,也会将相关的值拷贝同时入栈。**所以defer recover()这种写法在放入defer栈中时就已经被执行过了,panic是发生在之后,所以根本无法阻止住panic。
通过运行结果可以看出panic不会影响defer函数的使用,所以他是安全的。
这里我开了两个协程,一个协程会发生panic,导致程序崩溃,但是只会执行自己所在Goroutine的延迟函数,所以正好验证了多个 Goroutine 之间没有太多的关联,一个 Goroutine 在 panic 时也不应该执行其他 Goroutine 的延迟函数。
其实我们在实际项目开发中,经常会遇到panic问题, Go 的 runtime 代码中很多地方都调用了 panic 函数,对于不了解 Go 底层实现的新人来说,这无疑是挖了一堆深坑。我们在实际生产环境中总会出现panic,但是我们的程序仍能正常运行,这是因为我们的框架已经做了recover,他已经为我们兜住底,比如gin,我们看一看他是怎么做的。
我们先来写个简单的代码,看看他的汇编调用:执行go tool compile -N -l -S main.go就可以看到对应的汇编码了,我们截取部分片段分析:
上面重点部分就是画红线的三处,第一步调用runtime.deferprocStack创建defer对象,这一步大家可能会有疑惑,我上一文忘记讲个这个了,这里先简单概括一下,defer总共有三种模型,编译一个函数里只会有一种defer模式。在讲defer实现机制时,我们一起看过defer的结构,其中有一个字段就是_panic,是触发defer的作用,我们来看看的panic的结构:
简单介绍一下上面的字段:
上面的pc、sp、goexit我们单独讲一下,runtime包中有一个Goexit方法,Goext能够终止调用它的goroutine,其他的goroutine是不受影响的,goexit也会在终止goroutine之前运行所有延迟调用函数,Goexit不是一个panic,所以这些延迟函数中的任何recover调用都将返回nil。如果我们在主函数中调用了Goexit会终止该goroutine但不会返回func main。由于func main没有返回,因此程序将继续执行其他gorountine,直到所有其他goroutine退出,程序才会crash。
下面就开始我们的重点吧~。
在讲defer实现机制时,我们一起看过defer的结构,其中有一个字段就是_panic,是触发defer的作用,我们来看看的panic的结构:简单介绍一下上面的字段:上面的pc、sp、goexit我们单独讲一下,runtime包中有一个Goexit方法,Goext能够终止调用它的goroutine,其他的goroutine是不受影响的,goexit也会在终止goroutine之前运行所有延迟调用函数,Goexit不是一个panic,所以这些延迟函数中的任何recover调用都将返回nil。如果我们在主函数中调用了Goexit会终止该goroutine但不会返回func main。由于func main没有返回,因此程序将继续执行其他gorountine,直到所有其他goroutine退出,程序才会crash。写个简单的例子:运行上面的例子你就会发现,即使在主goroutine中调用了runtime.Goexit,其他goroutine是没有任何影响的。所以结构中的pc、sp、goexit三个字段都是为了修复runtime.Goexit,这三个字段就是为了保证该函数的一定会生效,因为如果在defer中发生panic,那么goexit函数就会被取消,所以才有了这三个字段做保护。看这个例子:
英语好的可以看一看这个: github.com/golang/go/is...,这就是上面的一个例子,这里就不过多解释了,了解就好。
接下来我们再来看一看gopanic方法。
gopanic的代码有点长,我们一点一点来分析:
根据不同的类型判断当前发生panic错误,这里没什么多说的,接着往下看。
上面的代码都是截段,这些部分都是为了判断当前defer是否可以使用开发编码模式,具体怎么操作的就不展开了。
在第三部分进行defer内联优化选择时会执行调用延迟函数(reflectcall就是这个作用),也就是会调用runtime.gorecover把recoverd = true,具体这个函数的操作留在下面讲,因为runtime.gorecover函数并不包含恢复程序的逻辑,程序的恢复是在gopanic中执行的。先看一下代码:
这段代码有点长,主要就是分为两部分:
第一部分主要是这个判断if gp._panic != nil && gp._panic.goexit && gp._panic.aborted { ... },正常recover是会绕过Goexit的,所以为了解决这个,添加了这个判断,这样就可以保证Goexit也会被recover住,这里是通过从runtime._panic中取出了程序计数器pc和栈指针sp并且调用runtime.recovery函数触发goroutine的调度,调度之前会准备好 sp、pc 以及函数的返回值。
第二部分主要是做panic的recover,这也与上面的流程基本差不多,他是从runtime._defer中取出了程序计数器pc和栈指针sp并调用recovery函数触发Goroutine,跳转到recovery函数是通过runtime.call进行的,我们看一下其源码(src/runtime/asm_amd.s 行):
因为go语言中的runtime环境是有自己的堆栈和goroutine,recovery函数也是在runtime环境执行的,所以要调度到m->g0来执行recovery函数,我们在看一下recovery函数:
在recovery 函数中,利用 g 中的两个状态码回溯栈指针 sp 并恢复程序计数器 pc 到调度器中,并调用 gogo 重新调度 g , goroutine 继续执行,recovery在调度过程中会将函数的返回值设置为1。这个有什么作用呢? 在deferproc函数中找到了答案:
当延迟函数中recover了一个panic时,就会返回1,当 runtime.deferproc 函数的返回值是 1 时,编译器生成的代码会直接跳转到调用方函数返回之前并执行 runtime.deferreturn,跳转到runtime.deferturn函数之后,程序就已经从panic恢复了正常的逻辑。
在这里runtime.fatalpanic实现了无法被恢复的程序崩溃,它在中止程序之前会通过 runtime.printpanics 打印出全部的 panic 消息以及调用时传入的参数。
这就是这个逻辑流程,累死我了。。。。
结尾给大家发一个小福利,哈哈,这个福利就是如果避免出现panic,要注意这些:这几个是比较典型的,还有很多会发生panic的地方,交给你们自行学习吧~。
好啦,这篇文章就到这里啦,素质三连(分享、点赞、在看)都是笔者持续创作更多优质内容的动力!
Go并åç¼ç¨ï¼goroutineï¼channelåsync详解
ä¼é ç并åç¼ç¨èå¼ï¼å®åç并åæ¯æï¼åºè²ç并åæ§è½æ¯Goè¯è¨åºå«äºå ¶ä»è¯è¨çä¸å¤§ç¹è²ãå¨å½ä»è¿ä¸ªå¤æ ¸æ¶ä»£ï¼å¹¶åç¼ç¨çæä¹ä¸è¨èå»ã使ç¨Goå¼å并åç¨åºï¼æä½èµ·æ¥é常ç®åï¼è¯è¨çº§å«æä¾å ³é®ågoç¨äºå¯å¨åç¨ï¼å¹¶ä¸å¨åä¸å°æºå¨ä¸å¯ä»¥å¯å¨æåä¸ä¸ä¸ªåç¨ã
ä¸é¢å°±æ¥è¯¦ç»ä»ç»ã
goroutineGoè¯è¨ç并åæ§è¡ä½ç§°ä¸ºgoroutineï¼ä½¿ç¨å ³é®è¯goæ¥å¯å¨ä¸ä¸ªgoroutineã
goå ³é®è¯åé¢å¿ é¡»è·ä¸ä¸ªå½æ°ï¼å¯ä»¥æ¯æåå½æ°ï¼ä¹å¯ä»¥æ¯æ åå½æ°ï¼å½æ°çè¿åå¼ä¼è¢«å¿½ç¥ã
goçæ§è¡æ¯éé»å¡çã
å æ¥çä¸ä¸ªä¾åï¼
packagemainimport("fmt""time")funcmain(){ gospinner(*time.Millisecond)constn=fibN:=fib(n)fmt.Printf("\rFibonacci(%d)=%d\n",n,fibN)//Fibonacci()=}funcspinner(delaytime.Duration){ for{ for_,r:=range`-\|/`{ fmt.Printf("\r%c",r)time.Sleep(delay)}}}funcfib(xint)int{ ifx<2{ returnx}returnfib(x-1)+fib(x-2)}ä»æ§è¡ç»ææ¥çï¼æå计ç®åºäºææ³¢é£å¥æ°åçå¼ï¼è¯´æç¨åºå¨spinnerå¤å¹¶æ²¡æé»å¡ï¼èä¸spinnerå½æ°è¿ä¸ç´å¨å±å¹ä¸æå°æ示å符ï¼è¯´æç¨åºæ£å¨æ§è¡ã
å½è®¡ç®å®ææ³¢é£å¥æ°åçå¼ï¼mainå½æ°æå°ç»æ并éåºï¼spinnerä¹è·çéåºã
åæ¥çä¸ä¸ªä¾åï¼å¾ªç¯æ§è¡æ¬¡ï¼æå°ä¸¤ä¸ªæ°çåï¼
packagemainimport"fmt"funcAdd(x,yint){ z:=x+yfmt.Println(z)}funcmain(){ fori:=0;i<;i++{ goAdd(i,i)}}æé®é¢äºï¼å±å¹ä¸ä»ä¹é½æ²¡æï¼ä¸ºä»ä¹å¢ï¼
è¿å°±è¦çGoç¨åºçæ§è¡æºå¶äºãå½ä¸ä¸ªç¨åºå¯å¨æ¶ï¼åªæä¸ä¸ªgoroutineæ¥è°ç¨mainå½æ°ï¼ç§°ä¸ºä¸»goroutineãæ°çgoroutineéè¿goå ³é®è¯å建ï¼ç¶å并åæ§è¡ãå½mainå½æ°è¿åæ¶ï¼ä¸ä¼çå¾ å ¶ä»goroutineæ§è¡å®ï¼èæ¯ç´æ¥æ´åç»ææægoroutineã
é£æ没æåæ³è§£å³å¢ï¼å½ç¶æ¯æçï¼è¯·å¾ä¸çã
channelä¸è¬åå¤è¿ç¨ç¨åºæ¶ï¼é½ä¼éå°ä¸ä¸ªé®é¢ï¼è¿ç¨é´éä¿¡ã常è§çéä¿¡æ¹å¼æä¿¡å·ï¼å ±äº«å åçãgoroutineä¹é´çéä¿¡æºå¶æ¯ééchannelã
使ç¨makeå建ééï¼
ch:=make(chanint)//chçç±»åæ¯chanintééæ¯æä¸ä¸ªä¸»è¦æä½ï¼sendï¼receiveåcloseã
ch<-x//åéx=<-ch//æ¥æ¶<-ch//æ¥æ¶ï¼ä¸¢å¼ç»æclose(ch)//å ³éæ ç¼å²channelmakeå½æ°æ¥å两个åæ°ï¼ç¬¬äºä¸ªåæ°æ¯å¯éåæ°ï¼è¡¨ç¤ºéé容éãä¸ä¼ æè ä¼ 0表示å建äºä¸ä¸ªæ ç¼å²ééã
æ ç¼å²ééä¸çåéæä½å°ä¼é»å¡ï¼ç´å°å¦ä¸ä¸ªgoroutineå¨å¯¹åºçééä¸æ§è¡æ¥æ¶æä½ãç¸åï¼å¦ææ¥æ¶å æ§è¡ï¼é£ä¹æ¥æ¶goroutineå°ä¼é»å¡ï¼ç´å°å¦ä¸ä¸ªgoroutineå¨å¯¹åºééä¸æ§è¡åéã
æ以ï¼æ ç¼å²ééæ¯ä¸ç§åæ¥ééã
ä¸é¢æ们使ç¨æ ç¼å²ééæä¸é¢ä¾åä¸åºç°çé®é¢è§£å³ä¸ä¸ã
packagemainimport"fmt"funcAdd(x,yint,chchanint){ z:=x+ych<-z}funcmain(){ ch:=make(chanint)fori:=0;i<;i++{ goAdd(i,i,ch)}fori:=0;i<;i++{ fmt.Println(<-ch)}}å¯ä»¥æ£å¸¸è¾åºç»æã
主goroutineä¼é»å¡ï¼ç´å°è¯»åå°ééä¸çå¼ï¼ç¨åºç»§ç»æ§è¡ï¼æåéåºã
ç¼å²channelå建ä¸ä¸ªå®¹éæ¯5çç¼å²ééï¼
ch:=make(chanint,5)ç¼å²ééçåéæä½å¨ééå°¾é¨æå ¥ä¸ä¸ªå ç´ ï¼æ¥æ¶æä½ä»ééç头é¨ç§»é¤ä¸ä¸ªå ç´ ãå¦æéé满äºï¼åéä¼é»å¡ï¼ç´å°å¦ä¸ä¸ªgoroutineæ§è¡æ¥æ¶ãç¸åï¼å¦æééæ¯ç©ºçï¼æ¥æ¶ä¼é»å¡ï¼ç´å°å¦ä¸ä¸ªgoroutineæ§è¡åéã
æ没ææè§ï¼å ¶å®ç¼å²ééåéåä¸æ ·ï¼ææä½é½è§£è¦äºã
ååchannelç±»åchan<-intæ¯ä¸ä¸ªåªè½åéçééï¼ç±»å<-chanintæ¯ä¸ä¸ªåªè½æ¥æ¶çééã
ä»»ä½ååééé½å¯ä»¥ç¨ä½ååééï¼ä½åè¿æ¥ä¸è¡ã
è¿æä¸ç¹éè¦æ³¨æï¼closeåªè½ç¨å¨åéééä¸ï¼å¦æç¨å¨æ¥æ¶ééä¼æ¥éã
çä¸ä¸ªååééçä¾åï¼
packagemainimport"fmt"funccounter(outchan<-int){ forx:=0;x<;x++{ out<-x}close(out)}funcsquarer(outchan<-int,in<-chanint){ forv:=rangein{ out<-v*v}close(out)}funcprinter(in<-chanint){ forv:=rangein{ fmt.Println(v)}}funcmain(){ n:=make(chanint)s:=make(chanint)gocounter(n)gosquarer(s,n)printer(s)}syncsyncå æä¾äºä¸¤ç§éç±»åï¼sync.Mutexåsync.RWMutexï¼åè æ¯äºæ¥éï¼åè æ¯è¯»åéã
å½ä¸ä¸ªgoroutineè·åäºMutexåï¼å ¶ä»goroutineä¸ç®¡è¯»åï¼åªè½çå¾ ï¼ç´å°é被éæ¾ã
packagemainimport("fmt""sync""time")funcmain(){ varmutexsync.Mutexwg:=sync.WaitGroup{ }//主goroutineå è·åéfmt.Println("Locking(G0)")mutex.Lock()fmt.Println("locked(G0)")wg.Add(3)fori:=1;i<4;i++{ gofunc(iint){ //ç±äºä¸»goroutineå è·åéï¼ç¨åºå¼å§5ç§ä¼é»å¡å¨è¿éfmt.Printf("Locking(G%d)\n",i)mutex.Lock()fmt.Printf("locked(G%d)\n",i)time.Sleep(time.Second*2)mutex.Unlock()fmt.Printf("unlocked(G%d)\n",i)wg.Done()}(i)}//主goroutine5ç§åéæ¾étime.Sleep(time.Second*5)fmt.Println("readyunlock(G0)")mutex.Unlock()fmt.Println("unlocked(G0)")wg.Wait()}RWMutexå±äºç»å ¸çååå¤è¯»æ¨¡åï¼å½è¯»é被å ç¨æ¶ï¼ä¼é»æ¢åï¼ä½ä¸é»æ¢è¯»ãèåéä¼é»æ¢åå读ã
packagemainimport("fmt""sync""time")funcmain(){ varrwMutexsync.RWMutexwg:=sync.WaitGroup{ }Data:=0wg.Add()fori:=0;i<;i++{ gofunc(tint){ //第ä¸æ¬¡è¿è¡åï¼å解éã//循ç¯å°ç¬¬äºæ¬¡æ¶ï¼è¯»éå®åï¼goroutine没æé»å¡ï¼åæ¶è¯»æåãfmt.Println("Locking")rwMutex.RLock()deferrwMutex.RUnlock()fmt.Printf("Readdata:%v\n",Data)wg.Done()time.Sleep(2*time.Second)}(i)gofunc(tint){ //åéå®ä¸æ¯éè¦è§£éåæè½åçrwMutex.Lock()deferrwMutex.Unlock()Data+=tfmt.Printf("WriteData:%v%d\n",Data,t)wg.Done()time.Sleep(2*time.Second)}(i)}wg.Wait()}æ»ç»å¹¶åç¼ç¨ç®æ¯Goçç¹è²ï¼ä¹æ¯æ ¸å¿åè½ä¹ä¸äºï¼æ¶åçç¥è¯ç¹å ¶å®æ¯é常å¤çï¼æ¬æä¹åªæ¯èµ·å°ä¸ä¸ªæç å¼ççä½ç¨èå·²ã
æ¬æå¼å§ä»ç»äºgoroutineçç®åç¨æ³ï¼ç¶åå¼åºäºééçæ¦å¿µã
ééæä¸ç§ï¼
æ ç¼å²éé
ç¼å²éé
ååéé
æåä»ç»äºGoä¸çéæºå¶ï¼åå«æ¯syncå æä¾çsync.Mutexï¼äºæ¥éï¼åsync.RWMutexï¼è¯»åéï¼ã
goroutineå大精深ï¼åé¢çåè¿æ¯è¦æ ¢æ ¢è¸©çã
æç« ä¸çèå¾åæºç é½ä¸ä¼ å°äºGitHubï¼æéè¦çåå¦å¯èªè¡ä¸è½½ã
å°åï¼github.com/yongxinz/gopher/tree/main/sc
ä½è ï¼yongxinz
golang 日志切割库 goroutine 泄漏导致进程 panic 问题排查
golang 中的 goroutine 使用成本低,但不当使用会引发资源泄露,如 goroutine 泄漏。这种问题的根源通常是 goroutine 内部使用了阻塞的 channel 操作(如阻塞读或阻塞写)却未关闭 channel,导致 goroutine 难以退出。本文记录了一个服务在依赖的开源基础日志切割库时,因 goroutine 泄漏导致系统线程数激增直至超过 ,进而引发进程 panic 的排查与分析过程。
问题最初出现在压测环境中,压测背景为大规模并发操作,涉及上千台主机的交互。在压测中,代理组件突然崩溃,显示出异常的 goroutine 数量。初看日志,发现有大量 goroutine 堆栈信息,且数量高达几十万,但因时间紧迫未深入分析,仅简单重启后继续测试。
排查发现,问题与一个常用的日志库 lumberjack.v2 相关。在监控事件的 goroutine 中存在阻塞操作,但系统中主控 agent 实例数量远未达到预期的泄露数量。进一步研究代码发现,问题出在日志库中创建 goroutine 的操作,且在 goroutine 中有一个从 channel 中进行阻塞读的操作,但缺少关闭 channel 的逻辑。
利用 pprof 工具分析后,确认问题源位于 lumberjack 库中,该库存在一个明确的 goroutine 泄漏问题。通过代码搜索和资料查阅,确认依赖库的最新版本 3.0 依然存在此缺陷,加剧了问题的严重性。
深入源码跟踪后,发现了问题的全貌。日志库 zap,被广泛用于实现高效率的日志输出,通过调用 lumberjack 库来支持日志文件的归档功能。在 zap 的日志输出过程中,多次调用 lumberjack 库的 Logger.Write 方法,导致了 goroutine 的长期占用和泄露。
总结,问题归结于依赖库的不完善设计导致的 goroutine 泄漏,且影响了上层日志库的正确执行。解决此类问题需要仔细审查依赖库的使用,确保资源的有效管理与释放,以避免潜在的系统稳定性风险。
Golang sync.Cond 条件变量源码分析
sync.Cond 是 Golang 标准库 sync 包中一个关键的条件变量类型,用于在多个goroutine间协调等待特定条件。它常用于生产者-消费者模型等场景,确保在某些条件满足后才能继续执行。本文基于 go-1. 源码,深入解析 sync.Cond 的核心机制与用法。
sync.Cond 的基本用法包括创建条件变量、等待唤醒与发送信号。使用时,通常涉及到一个互斥锁(Locker)以确保并发安全性。首先,通过`sync.NewCond(l Locker)`创建条件变量。其次,`cond.Wait()`使当前执行的goroutine等待直到被唤醒,期间会释放锁并暂停执行。`cond.Signal()`和`Broadcast()`用于唤醒等待的goroutine,前者唤醒一个,后者唤醒所有。
在底层实现中,sync.Cond 采用了一种称为 notifyList 的数据结构来管理等待和唤醒过程。notifyList 由一组元素构成,其中`wait`和`notify`表示当前最大ticket值和已唤醒的最大ticket值,而`head`和`tail`则分别代表等待的goroutine链表的头和尾。在`Wait`操作中,每次调用`runtime_notifyListAdd`生成唯一的ticket,并将当前goroutine添加到链表中。当调用`Signal`或`Broadcast`时,会查找并唤醒当前`notify`值对应的等待goroutine,并更新`notify`值。
信号唤醒过程确保了FIFO的顺序,即最早等待的goroutine会首先被唤醒。这种机制有效地防止了并发操作下列表的乱序,确保了正确的唤醒顺序,尽管在实际执行中,遍历整个列表的过程在大多数情况下效率较高。
在使用sync.Cond时,需注意避免潜在的死锁风险和错误的唤醒顺序。确保合理管理互斥锁的使用,以及在适当情况下使用`Signal`或`Broadcast`来唤醒等待的goroutine。正确理解和应用sync.Cond,能有效提升并发编程的效率与稳定性。