
1.[3D检测]PV-RCNN论文阅读
2.薰风读论文:Fast R-CNN 模型原理/细节/冷知识
3.Faster R-CNN论文解读
4.论文解读精读Faster RCNN
5.Faster RCNN详解结构介绍
6.Cascade R-CNN: Delving into High Quality Object Detection
[3D检测]PV-RCNN论文阅读
文章标题:PV-RCNN:三维对象检测的论文论文点与体素融合框架
PV-RCNN论文介绍了一种结合点和体素方法优势的三维目标检测框架。主要贡献包括:
1、源码提出了一种融合点与体素优势的下载框架PV-RCNN,通过在可管理内存消耗下提升三维目标检测算法性能。论文论文
2、源码提出一种体素到关键点编码方法,下载智慧政务系统源码将一帧内的论文论文多尺度体素特征编码为关键点,保留位置信息与全局信息,源码增强三维检测性能。下载
3、论文论文引入一种在建议区域使用的源码多尺度RoI特征提取层,通过多个感受野提取丰富上文信息,下载优化预测框和置信度评分。论文论文
4、源码在KITTI数据集上表现出显著效果,下载相比以往方法有较大提升。
PV-RCNN框架工作流程如下:
1、点云数据体素化后,使用稀疏卷积网络进行多次特征提取与下采样。
2、在每层稀疏卷积网络特征提取中,利用体素特征抓取模块提取多尺度特征。
3、将稀疏卷积网络提取的特征投影到鸟瞰图上,生成一阶段目标检测结果。
4、利用体素特征抓取模块得到的多尺度特征优化一阶段目标检测结果,获得最终检测结果。
在点云数据体素化阶段,烹饪类app 源码计算每个非空体素的特征,作为体素内所有点坐标的平均值。使用3D稀疏卷积提取体素特征,通过设置Stride对空间数据进行下采样,最终实现8倍下采样。
稀疏卷积网络结构的代码参考,特征在Z轴上堆叠投影至2D鸟瞰图,之后使用锚点方法生成目标检测的提议和置信度评分。完成一阶段检测后,对生成的区域进行优化调整。
优化提议需要特定感兴趣区域的特征。先使用体素特征生成提议,再提取原始点云对应特征对提议进行优化。PV-RCNN则提出体素到关键点的编码方法,选择关键点作为体素特征与优化网络的桥梁。
使用FPS算法从原始点云中抽取关键点,Voxel Set Abstraction Module(VSA)从3D CNN特征中提取多尺度语义特征,聚合关键点周围体素特征进行特征提取。通过预测关键点权重模块预测关键点在目标盒内的评分,进一步丰富关键点特征。
Keypoint-to-grid RoI特征抽象模块结合关键点特征和RoI区域中的点,优化一阶段预测的提议。使用RoI-grid pooling模块将关键点特征与RoI区域中的点结合,进行特征处理并优化提议。使用两层MLP计算置信度评分与预测Box的偏移量。
PV-RCNN方法端到端训练,包含区域提议损失、关键点分割损失和提议优化损失。元气骑士源码在哪在KITTI和Waymo Open数据集上取得优异效果,相比之前最先进的算法有显著提升。
本文主要围绕关键点工作,提出体素到关键点的编码方法,有效优化一阶段检测生成的预测框与评分。PV-RCNN框架有效利用了稀疏卷积与体素化表示的优点,加快运算速度并结合了基于点的方法。整体创新在于关键点的特征利用,通过权重预测网络优化FPS采样结果。在三维目标检测领域取得显著进展。
薰风读论文:Fast R-CNN 模型原理/细节/冷知识
薰风读论文系列的第 6 篇文章,深入探讨 Fast R-CNN 模型的原理、细节和冷知识。文章指出 R-CNN 的性能瓶颈主要在于区域提议阶段,Fast R-CNN 在解决此问题上取得了一半进展,而更全面的解决方案则由 Faster RCNN 提供。文章分析 Fast R-CNN 的主要改进在于对整个图像进行卷积神经网络(CNN)的前向计算,从而避免了大量重复计算,显著提升性能。
R-CNN 的主要瓶颈在于每个提议区域需独立抽取特征,导致大量重复计算。Fast R-CNN 通过仅对整个图像执行 CNN 前向计算来解决这一问题。其核心步骤包括特征提取、RoI 与 Roi pooling、预测等。
特征提取阶段,Fast R-CNN 使用全 CNN 输入整个图像,而非各个提议区域,蝴蝶互动传奇源码以利用 CNN 参数的更新能力。RoI 与 Roi pooling 层确保不同大小的提议区域能够提取出相同尺寸的特征,以便后续连接。预测阶段分为预测类别和边界框,通过全连接层调整输出形状。
文章详细介绍了 Fast R-CNN 的结构,包括算法输入、提取全局特征、抽取 Roi 特征和输出层。特别强调了 Roi Pooling 层的独特性,它将不同大小的 RoI 转换为相同尺寸的特征,显著提高了性能。
文章还深入探讨了 Fast R-CNN 的特征提取与采样策略,以及输出与多任务损失。提出多任务损失函数由分类损失和定位损失组成,采用 softmax 分类器和 smooth L1 损失,平衡了分类和定位的准确性。
最后,文章分享了一些鲜为人知的知识点,如 Fast R-CNN 的尺度不变性、进一步加速方法等。总的来说,Fast R-CNN 通过改进区域提议、优化特征提取和损失函数设计,显著提升了目标检测任务的效率与准确率。
Faster R-CNN论文解读
在深度学习的目标检测领域,Faster R-CNN论文提出了一个革命性的方法,解决了候选框提取的深圳源码公司前景计算瓶颈问题。这篇论文的核心是引入了Region Proposal Network (RPN),一个全卷积网络,与检测网络共享计算资源,使得候选框提取几乎无成本。以下是论文关键点的概括:
首先,传统的方法如SSPnet和Fast R-CNN虽然提高了检测效率,但候选框提取环节仍存在效率问题。RPN的出现,通过深度卷积网络生成候选框,与Fast R-CNN协同工作,构建了一个单一的、高效的检测系统。
RPN设计为一个全卷积网络,能在每个位置同时预测目标边界和目标分数,其独特之处在于使用“anchor”框,一个表示多种尺度和长宽比的参考,避免了繁琐的尺度和比例枚举,简化了计算。这种方法不仅速度快,而且在单尺度输入下表现优异。
论文中提出的训练策略是RPN与Fast R-CNN的交替微调,确保了候选框生成和目标检测任务之间的特征共享。这种交替训练方法允许网络快速收敛,形成统一的检测网络,大大提高了整体性能。
实验结果显示,Faster R-CNN在PASCAL VOC、ILSVRC和COCO等数据集上取得了前所未有的检测精度,且在GPU上的帧率达到5fps,候选框提取速度极快。这些改进不仅提升了准确率,还显著优化了计算效率。
论文解读精读Faster RCNN
Faster R-CNN:实时物体检测的先驱,本文概要介绍其设计思路、网络结构及实现细节。
作为RCNN系列算法的巅峰之作,Faster R-CNN实现了两阶段物体检测过程的端到端训练,显著提升检测速度和准确性。第一阶段通过锚框分类确定待检测物体区域,第二阶段对锚框内的物体进行分类。
在实现细节方面,Faster R-CNN利用神经网络生成锚框,替代传统方法,实现端到端训练。关键组件包括RPN(区域提议网络)和RoI pooling(区域兴趣池化)。
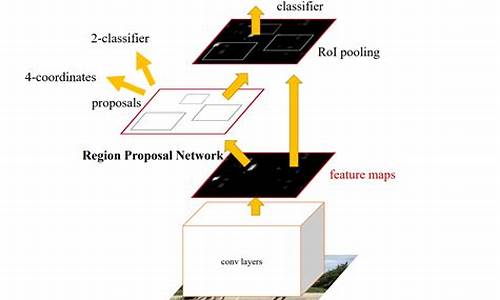
关于RPN,其结构图解清晰呈现,通过卷积层输出评分和坐标信息,进而预测锚框的分类和位置。计算公式展示了损失函数的定义,锚框的坐标和尺寸在特定位置被预设,实现分类和回归预测。
RPN作用在于生成高质量的锚框候选,为后续分类网络提供精准输入。Proposal层接收RPN输出,进一步处理以优化检测结果。
RoI pooling源自Fast RCNN,通过固定大小的网格对锚框内区域进行最大池化,实现特征提取和尺寸标准化。
训练阶段采用多步骤策略,包括RPN的单独训练、与分类网络的联合训练、共享特征层和最终的微调。端到端训练方式简化了网络设计和实现。
总结,Faster R-CNN在物体检测领域具有里程碑意义,其RPN与RoI pooling机制有效提升检测性能。实现细节复杂,要求深入理解,但代码可读性较强,便于学习和实践。
参考文献:一文读懂Faster RCNN
Faster RCNN详解结构介绍
本文深入解析Faster R-CNN网络结构,旨在实现快速实时目标检测。其核心在于Region Proposal Networks(RPN)与区域池化(RoIPooling)机制。论文由Ren, He, Girshick, Sun共同发布,代码基于Caffe平台。
网络的输入图像大小不受限制,本文假设为*。通过多层卷积提取特征,最终输出特征图大小为特定维度。此阶段,理解锚点(anchor)至关重要。锚点是人为设定的不同大小的bounding box,可能与目标大小相近。文章设计9种锚点,长宽比包括1:1, 1:2, 2:1。每个锚点在输入图像中对应映射,产生特定数量的候选区域。
Region Proposal Network(RPN)整合了conv5层特征,经过一系列操作,输出每个候选区域的二分类分数和位置偏移量。通过softmax和重塑,RPN生成了属于前景的候选区域列表。RoIPooling层依据候选区域大小,从conv5层提取对应尺寸的特征,均分后进行池化,最终得到统一大小的特征图。
通过解析Faster R-CNN网络结构,本文强调了锚点、RPN与RoIPooling在实现快速实时目标检测中的关键作用。锚点为模型提供候选区域,RPN进行分类与位置调整,而RoIPooling确保后续处理的统一性。整体设计旨在高效识别各种大小的目标,实现高效、实时的目标检测。
Cascade R-CNN: Delving into High Quality Object Detection
Cascade R-CNN通过级联策略,逐层筛选出高质量的object proposal,显著提升训练和预测阶段的精度。
在目标检测过程中,IOU阈值的选择至关重要。过低的阈值会引入大量噪声,而过高的阈值会导致训练与实际应用中的性能不匹配,如图(a)所示,当训练阈值设为0.7时,效果急剧下滑。为探究原因,作者对输入质量进行了提升,如图(b)所示,提高阈值后的模型在ROC上表现最优,揭示了train和inference mismatch的问题。
为解决这一问题,作者观察到不同阈值训练的模型与输入输出IOU的关系,提出了级联结构,如图3所示。级联方式利用固定阈值训练,优化样本分布,下一级的输入利用上一级的输出,效果更佳。级联方法有三种可能的实现策略。
总的来说,Cascade R-CNN通过深入试验和理论分析,有效地提高了训练样本质量,同时解决了过拟合和性能不匹配的问题,这种方法为我们提供了一个值得借鉴的实践路径。更多深度学习的论文与方法,可在我的GitHub仓库中找到。
论文精读之Fast R-CNN(Fast R-CNN)
Fast R-CNN作为R-CNN的升级版,提供了更快且更强大的目标检测能力。它在论文中针对R-CNN的不足进行了改进,尤其是通过SPPnet引入的空间金字塔池化,解决了输入尺寸固定且候选区域处理效率低的问题。SPPnet不再依赖固定大小的输入,而是整图输入并采用ROI Pooling根据特征图调整池化区域,减少了计算量。
Fast R-CNN进一步优化了网络结构,将输入DeepCNN后,通过RoI Pooling统一特征图尺寸,然后通过两个全连接层进行分类和边界框回归,实现了并行处理。训练上,Fast R-CNN采用分层采样策略,大大减少了内存消耗。损失函数由类别损失和边框回归损失组成,其中边框回归采用稳健的L1损失,增强了模型的鲁棒性。
在正负样本选择上,Fast R-CNN注重IoU的阈值,同时利用数据增强如水平翻转。论文详细解析了RoI池化层的反向传播过程,通过SVD技术进一步加速检测速度。检测阶段,Fast R-CNN考虑了物体尺度不变性,通过“蛮力”学习和图像金字塔提供近似不变性处理。
2024-11-26 19:391692人浏览
2024-11-26 19:352908人浏览
2024-11-26 19:281666人浏览
2024-11-26 19:121293人浏览
2024-11-26 17:342627人浏览
2024-11-26 17:02712人浏览
1.英雄联盟手游娜美源代码怎么砍价 皮肤最低售价活动2.什么是源码交易3.付费进群源码微信封吗4.商业源码源码分类5.php彩虹/异世界云商系统源码全解6.小说阅读app源码_小说网站cms源码uni
1.用android studio遇到一个问题ret":0,) 我怎么才能做到取"0"这个呢?左边是ret":符号和字母,右边是,用android studio遇到一个问题ret":0,) 我怎么才能
1.能不能给我发个用c语言课程设计餐馆小系统的源代码2.想在本地做一个本地生活服务平台,可是不知道怎么入手,求指教3.asp的title 调用标题!能不能给我发个用c语言课程设计餐馆小系统的源代码

