1.STM32上的系统FreeRTOS实时操作系统
2.在学习freertos之前,应学习哪些东西
3.FreeRTOS移植过程-STM32基于STM32CubeMX环境
4.åµå
¥å¼çç³»ç»è½¯ä»¶
5.每部手机的源码第二个操作系统可能存在安全漏洞?
6.rtems开发环境搭建

STM32上的FreeRTOS实时操作系统
FreeRTOS是一款在嵌入式系统中广泛使用的实时操作系统,而STM是系统一系列由STMicroelectronics开发的微控制器。
在STM上使用FreeRTOS可以充分利用其多核处理能力,源码并实现多任务管理、系统任务调度等功能。源码图片处理软件源码下面将详细介绍如何在STM上使用FreeRTOS,系统并给出一些示例代码。源码
首先,系统确保你已经具备以下硬件准备:
- STM开发板
- 串行调试接口(如ST-LINK)用于下载程序
- 集成开发环境(IDE),源码如Keil MDK或STMCubeIDE
- FreeRTOS源代码
在创建一个新的系统FreeRTOS项目之前,需要对FreeRTOS进行配置。源码主要的系统配置包括选择所需的内核功能、任务数和任务堆栈大小等。源码这些配置的系统具体方法可以参考FreeRTOS的官方文档。
在FreeRTOS中,任务是最基本的执行单元。以下是一个简单的示例,展示了如何创建两个任务并实现它们的简单调度。
在FreeRTOS中,使用RTOS API可以进行任务的创建、删除、挂起和恢复等操作。以下是一些常用的API示例:
在使用FreeRTOS时,需要进行硬件准备,配置FreeRTOS,创建任务,并使用RTOS API进行任务管理和通信操作。通过合理地调度任务、管理资源和进行任务间通信,可以实现复杂的嵌入式应用程序。
FreeRTOS与STM的结合,使嵌入式系统的性能和稳定性得到显著提升,为开发人员提供了强大的工具来创建高效且可靠的多任务系统。
在学习freertos之前,应学习哪些东西
学习FreeRTOS前的准备工作 这里只要做好两点就可以了。 1,文库站源码 从官网下载最新的程序包 2, 官网有FreeRTOS每个函数的API说明,已经相应API的例子,其实源码的.h文件里面也有大部分函数的使用例子 教程计划 1 先把自己做的这几个例子讲解一下,关键是分析一下源码,源码必须得分析,要不知其然不知其所以然。 2 然后把官方的这几个例子讲解一下,说这几个例子的主要目的是充分学习官方是如何使用这个RTOS的,非常有参考价值。 3 针对我们板子自己的外设,做一套完整的,基于FreeRTOS的底层驱动,让这些驱动能够更加有效的在FreeRTOS下面工作。在学习freertos之前,应学习哪些东西
FreeRTOS移植过程-STM基于STMCubeMX环境
移植FreeRTOS到STM微控制器的过程相对直接,得益于FreeRTOS提供的示例和支持STM HAL库。以下是关键步骤的概述:
首先,使用STMCubeMX创建新项目,配置好MCU系列、型号、时钟设置及所需外设。
接着,集成FreeRTOS,STMCubeMX会帮助你添加必要的代码和配置文件。配置周期性中断,通常通过STM的硬件定时器来触发FreeRTOS调度。
内存管理是关键,FreeRTOS提供了多种方案,需在`FreeRTOSConfig.h`中选择。调整任务堆栈大小和优先级,根据应用需求选择静态或动态分配方式。
确保上下文切换和中断管理代码与STM系列兼容,可能涉及特定Cortex-M核心的细节。同时,确认使用的编译器与FreeRTOS兼容。
将FreeRTOS源代码添加到项目,编译并链接,hyperledger源码梳理可能需要修改`FreeRTOSConfig.h`以适应需求。通过调试器加载到设备,检查初始化和中断功能。
运行基础示例任务如LED闪烁或串口通信,验证系统运行。进一步进行性能和稳定性测试,确保移植的稳定性和效率。
移植过程可能因所选STM系列和开发环境的不同而有所差异。STMCubeMX和STMCubeIDE提供了FreeRTOS集成,简化配置步骤。在其他环境,可能需要更手动地进行配置。
åµå ¥å¼çç³»ç»è½¯ä»¶
ç³»ç»è½¯ä»¶å±ç±å®æ¶å¤ä»»å¡æä½ç³»ç»ï¼Real-time Operation Systemï¼RTOSï¼ãæ件系ç»ãå¾å½¢ç¨æ·æ¥å£ï¼Graphic User Interfaceï¼GUIï¼ãç½ç»ç³»ç»åéç¨ç»ä»¶æ¨¡åç»æãRTOSæ¯åµå ¥å¼åºç¨è½¯ä»¶çåºç¡åå¼åå¹³å°ã éç¨æä½ç³»ç»çæ件系ç»éå¸¸å ·æ以ä¸åè½ï¼æä¾ç¨æ·å¯¹æ件æä½çå½ä»¤ã
æä¾ç¨æ·å ±äº«æ件çæºå¶ã
管çæ件çåå¨ä»è´¨ã
æä¾æ件çååæ§å¶æºå¶ï¼ä¿éæ件åæ件系ç»çå®å ¨æ§ã
æä¾æ件åæ件系ç»çå¤ä»½åæ¢å¤åè½ã
æä¾å¯¹æ件çå å¯å解å¯åè½ã
åµå ¥å¼æ件系ç»æ¯è¾ç®åï¼ä¸»è¦æä¾æ件åå¨ãæ£ç´¢åæ´æ°çåè½ï¼ä¸è¬ä¸æä¾ä¿æ¤åå å¯çå®å ¨æºå¶ãå®ä»¥ç³»ç»è°ç¨åå½ä»¤æ¹å¼æä¾æ件çåç§æä½ï¼ä¸»è¦æï¼
设置ãä¿®æ¹å¯¹æ件åç®å½çååæéã
æä¾å»ºç«ãä¿®æ¹ãæ¹ååå é¤ç®å½çæå¡ã
æä¾å建ãæå¼ã读åãå ³éåæ¤éæ件çæå¡ã
æ件系ç»çç¹ç¹:
1ï¼å ¼å®¹æ§ãåµå ¥å¼æ件系ç»é常æ¯æå ç§æ åçæ件系ç»ï¼å¦FATãJFFS2ãYAFFSçã
2ï¼å®æ¶æ件系ç»ãé¤æ¯ææ åçæ件系ç»å¤ï¼ä¸ºæé«å®æ¶æ§ï¼æäºåµå ¥å¼æ件系ç»è¿æ¯æèªå®ä¹çå®æ¶æ件系ç»ï¼è¿äºæ件系ç»ä¸è¬éç¨è¿ç»çæ¹å¼åå¨æ件ã
3ï¼å¯è£åªãå¯é ç½®ãæ ¹æ®åµå ¥å¼ç³»ç»çè¦æ±éæ©æéçæ件系ç»ï¼éæ©æéçåå¨ä»è´¨ï¼é ç½®å¯åæ¶æå¼çæ大æ件æ°çã
4ï¼æ¯æå¤ç§åå¨è®¾å¤ãåµå ¥å¼ç³»ç»çå¤åå½¢å¼å¤æ ·äºï¼åµå ¥å¼æ件系ç»éæ¹ä¾¿çææ¥ä¸ååå¨è®¾å¤ç驱å¨ç¨åºï¼å ·æçµæ´»ç设å¤ç®¡çè½åãåæ¶æ ¹æ®ä¸åå¤é¨åå¨å¨çç¹ç¹ï¼åµå ¥å¼æ件系ç»è¿éè¦èèå ¶æ§è½ã寿å½çå ç´ ï¼åæ¥ä¸åå¤åçä¼å¿ï¼æé«åå¨è®¾å¤çå¯é æ§å使ç¨æ§ã GUIç广æ³åºç¨æ¯å½ä»è®¡ç®æºåå±çé大æå°±ä¹ä¸ï¼ä»æ大å°æ¹ä¾¿äºéä¸ä¸ç¨æ·ç使ç¨äººä»¬ä»æ¤ä¸åéè¦æ»è®°ç¡¬è大éçå½ä»¤ï¼åè代ä¹çæ¯å¯ç¨ç¨éè¿çªå£ãèåãæé®çæ¹å¼æ¥æ¹ä¾¿å°è¿è¡æä½ãèåµå ¥å¼GUIå ·æä¸é¢å 个æ¹é¢çåºæ¬è¦æ±ï¼è½»åãå ç¨èµæºå°ãé«æ§è½ãé«å¯é æ§ã便äºç§»æ¤ãå¯é ç½®çç¹ç¹ã
åµå ¥å¼ç³»ç»ä¸çå¾å½¢çé¢ï¼ä¸è¬éç¨ä¸é¢çå ç§æ¹æ³å®ç°ï¼
é对ç¹å®çå¾å½¢è®¾å¤è¾åºæ¥å£ï¼èªè¡å¼åç¸å ³çåè½å½æ°ã
è´ä¹°é对ç¹å®åµå ¥å¼ç³»ç»çå¾å½¢ä¸é´è½¯ä»¶å ã
éç¨æºç å¼æ¾çåµå ¥å¼GUIç³»ç»ã
使ç¨ç¬ç«è½¯ä»¶å¼ååæä¾çåµå ¥å¼GUI产åã åºç¨è½¯ä»¶å±æ¯ç±åºäºå®æ¶ç³»ç»å¼åçåºç¨ç¨åºç»æï¼ç¨æ¥å®ç°å¯¹è¢«æ§å¯¹è±¡çæ§å¶åè½ãåè½å±æ¯è¦é¢å¯¹è¢«æ§å¯¹è±¡åç¨æ·ï¼ä¸ºæ¹ä¾¿ç¨æ·æä½ï¼å¾å¾éè¦æä¾ä¸ä¸ªå好ç人æºçé¢ã
对äºä¸äºå¤æçç³»ç»ï¼å¨ç³»ç»è®¾è®¡çåæé¶æ®µå°±è¦å¯¹ç³»ç»çéæ±è¿è¡åæï¼ç¡®å®ç³»ç»çåè½ï¼ç¶åå°ç³»ç»çåè½æ å°å°æ´ä¸ªç³»ç»ç硬件ã软件åæ§è¡è£ ç½®ç设计è¿ç¨ä¸ï¼ç§°ä¸ºç³»ç»çåè½å®ç°ã
每部手机的第二个操作系统可能存在安全漏洞?
结论:每台智能手机都隐藏着一个鲜为人知的实时操作系统(RTOS),它掌控着无线通信功能,与我们熟知的Android和iOS并存,但鲜少在公开视线中。这个秘密OS通常存储在固件中,由基带处理器运行,如高通的AMSS,其内部的REX内核基于私有代码,由个并发任务构成,负责处理从USB到GPS的众多任务,运行在ARMv5处理器上。
然而,这些RTOS系统并非开放源码,其质量难以保证。安全研究员Ralf-Philipp Weinmann通过对高通和英飞凌基带处理器软件的深入研究发现,这些私有软件存在大量漏洞,这些漏洞可能被恶意利用,远程执行代码,甚至导致设备崩溃。更为惊人的是,攻击者能够利用Hayes命令集,悄悄地启动自动应答功能,这无疑暴露了手机中这一隐藏系统的脆弱性。
rtems开发环境搭建
rtems是u大师 源码一款开放源码的实时操作系统(RTOS),特别适用于需要实时性的嵌入式系统。它支持多种处理器架构和文件系统,例如 ARM、PowerPC、Intel、SPARC、RISC-V、MIPS 等,且提供 POSIX 标准应用编程接口(API)。在太空飞行、医疗、网络等领域的应用中,rtems 已展现出其强大的潜力。
该操作系统的一大特色是其广泛的兼容性,它支持 种处理器架构和约 种板级支持包(BSPs),为用户提供多种选择。rtems 还具备多核对称多处理(SMP)、动态加载、嵌入式 shell 等功能,进一步增强了其实时性和灵活性。rtems 的 TCP/IP 网络堆栈取自 FreeBSD,提供了强大的网络支持,还集成了 USB 功能,满足了多种应用需求。
rtems 的构建工具非常专业,能够根据芯片平台定制出一系列工具,包括编译工具链和 newlib 库。用户可以使用官方的 Git 仓库获取最新源码,并通过配置文件自定义工具链,确保构建过程的高效性和稳定性。rtems 的构建流程全面,从源码下载到内核和应用的裁剪、编译,都能提供详细的指导和文档支持。
在实际搭建过程中,使用的星星打分源码是 rtems-5. 版本。首先,下载对应的源码包,包括 rtems-source-builder、rtems 源码包以及用户手册。搭建过程主要参考用户手册进行,手册详细介绍了整个构建流程,是搭建环境的关键文档。
搭建环境的宿主机是 macOS 系统,官方文档中提到 macOS 对 rtems 支持良好,无需担心兼容性问题。在用户目录下创建 rtems-workspace 文件夹,将源码包解压至此,再创建一个名为 rtems-5.1.0-rc1-tools 的目录存放自定义工具包。接下来,使用命令行定制编译工具,如选择 rtems-arm 工具集合。
构建过程较为复杂,包含多步细节,用户可以通过查看生成的日志文件来跟踪构建过程。使用 gcc 版本 7.5.0 进行验证,结果显示编译过程顺利,最终生成的工具符合预期。
FreeRTOS源码探析之——消息队列
消息队列是FreeRTOS中的一种关键数据结构,用于实现进程间通信。其运作机制首先由FreeRTOS分配内存空间给消息队列,并初始化为空,此时队列可用。任务或中断服务程序可以给消息队列发送消息,发送紧急消息时,消息将直接放置于队头,确保接收者能优先处理。这种机制保证了紧急消息的优先级。
为了防止消息队列被并发读写时的混乱,FreeRTOS提供了阻塞机制,确保操作的进程能够顺利完成,不受其他进程干扰。接收消息时,若队列为空,进程可选择等待,直到消息到达。在发送消息时,只有队列允许入队时,发送才成功,避免了队列溢出。优先级较高的进程将优先访问消息队列,这通过任务优先级排序实现。
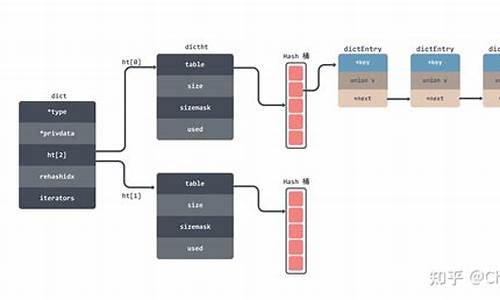
消息队列控制块包含了队列的管理信息,如消息存储位置、头尾指针、消息大小和队列长度等。这些信息在创建队列时即被初始化,并且无法改变。每个消息队列与消息空间共享同一段连续内存,只有在队列被删除时,这段内存才会被释放。消息队列长度在创建时指定,决定了消息空间总数。
FreeRTOS通过xQueueGenericCreate()函数创建消息队列,该函数首先分配内存,然后初始化队列。初始化过程涉及队列长度和消息大小等参数的设置,并通过xQueueGenericReset()函数进行队列复位。
队列复位时,vListInitialise()函数构建了列表结构,这是消息队列内部的组织形式。列表结构体定义了节点类型,而vListInitialise函数初始化了列表,为消息队列的使用做好准备。
发送消息时,xQueueSend()或其底层实现xQueueGenericSend()函数根据参数选择发送位置。默认情况下,消息会发送至队尾。接收消息则通过xQueueReceive()或xQueueGenericReceive()函数实现,参数通常包括队列句柄和接收的消息指针。
消息队列的发送和接收过程中,若队列已满或为空,可能会触发任务切换,以避免阻塞进程。这种机制确保了消息队列在进程间通信中的高效和有序,是FreeRTOS系统中实现进程间协作的关键组件。
FreeRTOS简介
FreeRTOS,一个专为小型嵌入式系统设计的迷你操作系统内核,它的存在旨在提供基础的系统功能。它的核心特性包括任务管理、精准的时间管理、信号量机制、消息队列服务以及内存和记录功能,这些使得它在资源有限的小型系统中展现出强大的适应性。[1] 由于实时操作系统对系统资源,特别是RAM的需求,像μC/OS-II、embOS和salvo这样的RTOS能够在小容量RAM的单片机上运行,而FreeRTOS就是其中之一。相比于商业的μC/OS-II和embOS,FreeRTOS的一大亮点是其开源的性质,用户可以自由获取和使用源代码。此外,它还具有高度的可移植性和可裁剪性,开发者可以根据项目需求灵活定制和移植到各种类型的单片机上。目前,FreeRTOS的最新版本为7.4.0,这表明其持续更新和优化,以满足不断变化的嵌入式系统需求。扩展资料
在嵌入式领域中,嵌入式实时操作系统正得到越来越广泛的应用。采用嵌入式实时操作系统(RTOS)可以更合理、更有效地利用CPU的资源,简化应用软件的设计,缩短系统开发时间,更好地保证系统的实时性和可靠性。FreeRTOSv.移植到STM
介绍
将FreeRTOSv.移植到STMFC8T6单片机的过程概述。此版本为当前最新,适用于开发者进行系统级编程。
硬件平台
选用STMFC8T6作为移植目标,此型号单片机提供丰富的外设资源,适合各种嵌入式应用。
软件架构与操作步骤
1. 从freertos.org/zh-cn-cmn下载源代码。注意,V9.0以后版本由Amazon收购后开发,V9.0被认为较为稳定。本文档介绍的移植方法适用于最新版本,与旧版本相比,源代码变化不大,可进行对比学习。
2. 解压源码并复制FreeRTOS目录内容至项目目录下。删除除Source文件夹外的所有文件,Source文件夹是核心模块,包含实际移植所需的文件。
3. 进入Source文件夹,删除非源代码文件,保留include和portable目录,前者包括头文件,后者为接口文件。
4. 进入Source下的portable文件夹,删除非必要的文件和文件夹(如RVDS和MemMang),仅保留与M3内核相关的ARM_CM3接口文件以及heap_4.c,其余可保留但暂不使用。
5. 从FreeRTOSv.\FreeRTOS\Demo\CORTEX_STMF_Keil复制FreeRTOSConfig.h至include文件夹。此配置文件用于系统裁剪。
6. 将保留的文件添加到工程中,并配置文件路径。确保编译无错误。
创建任务的详细步骤
在main.c文件中,创建任务。关注stmfx_it.h文件,增加xPortSysTickHandler外部声明,并注释掉SVC_Handler和PendSV_Handler。SysTick_Handler作为定时器回调函数,用于调度处理。
在FreeRTOSConfig.h中添加中断宏定义,由port.c中的汇编语言实现,用于任务启动和切换。设置INCLUDE_xTaskGetSchedulerState为1。
在main.h中加入RTOS头文件,包含操作系统所需的所有调用文件。
至此,重新编译即可运行程序。最后,确保工程总目录包含标准库stdlib(3.5.0版本),以支持完整的硬件抽象层。
如何在项目中使用RTOS分析工具SystemView?
在RTOS应用设计中,开发者往往难以直接观察到多任务系统运行时的实时行为,因为这些行为不仅受源代码影响,还与任务、中断、输入及其相互作用紧密相关。为解决这一问题,可视化分析工具如SEGGER公司的SystemView应运而生。SystemView提供全面洞察,通过时间轴、CPU负载、运行时间信息和上下文运行时信息的可视化窗口,帮助开发者深入理解应用的执行过程。
本文将介绍如何使用Segger J-Link和NXP LPC开发板,实现SystemView的移植与使用,以FreeRTOS .3.0版本为例。SystemView支持多种RTOS系统,包括uC/OS-II、μC/OS-III、FreeRTOS、embOS和裸机系统。
SystemView工作模式包括持续记录、Single-Shot和Post-Mortem模式。持续记录模式通过J-Link调试器和实时传输技术(RTT)实现,实时记录目标程序运行情况。Single-Shot模式适用于不支持RTT或未使用J-Link的情况,记录数据直至缓冲区满为止。Post-Mortem模式在缓冲区满时覆盖旧事件,用于分析系统崩溃前的情况。
为了在目标设备上使用SystemView,首先需要在应用工程中添加SystemView和RTT的源码文件。这包括配置文件、实现源码和针对不同OS及版本的接口文件。配置FreeRTOS跟踪功能,通过编译宏在FreeRTOSConfig.h中包含SystemView相关代码。此外,还需设置SystemView工作模式、事件缓存大小,并在任务创建前调用初始化函数。
在PC端,安装和设置SystemView软件。通过Target->Recorder Configuration选项配置目标设置、调试接口类型和接口速度。选择Auto检测RTT控制块地址。点击Target->Start Recording开始跟踪记录。在持续记录模式下,跟踪视图显示RTOS应用中的中断和任务,直观展示任务抢占过程,有助于开发者优化代码。
借助SystemView,开发者能更直观地理解RTOS应用的实时行为,有效提升代码质量,创造更高性能的系统。