1.4.AMCL包源码分析 | 传感器模型与sensor文件夹
2.ADAS-干货|一文入门汽车毫米波雷达基本原理
3.不可错过的探地gmapping算法使用与详细解释
4.一款允许任何人搜索并可能定位地球上任何地方的有源军用雷达系统
5.Cartographer源码详解|(2)Cartographer_ros
6.navigator是什么意思
4.AMCL包源码分析 | 传感器模型与sensor文件夹
AMCL包在机器人定位中扮演关键角色,通过粒子滤波器实现对机器人位姿的雷达估计。本文将深入探讨AMCL包的源码用探核心组成部分:运动模型与观测模型,以及它们对输出位姿的地雷达源影响机制。运动模型与观测模型共同协作,码用确保粒子滤波器能够准确地跟随机器人运动,探地内存操作.搜索源码并通过观测更新粒子的雷达权重,最终输出机器人在环境中的源码用探估计位姿。
在AMCL包中,地雷达源传感器模型主要体现在两个重要类的码用定义:AMCLSensor和AMCLSensorData。AMCLSensor类提供了一组接口,探地用于根据运动模型更新粒子滤波器,雷达同时定义运动模型中的源码用探位姿。与此并行的地雷达源是AMCLSensorData类,它负责组织AMCLSensor类的码用实例,确保它们能够协同工作以实现高效的粒子滤波。
运动模型是AMCL包中的核心组件之一,它主要关注于根据机器人当前的运动类型(如差分驱动或全向驱动)来选择相应的运动模型。这些模型通过更新粒子样本的位姿来反映机器人的运动情况。运动模型通常涉及定义不同输入参数,并通过模拟机器人的物理运动来更新粒子滤波器的状态。
观测模型则负责对粒子滤波器进行观测更新,即根据传感器输入(如激光雷达或里程计数据)计算每个粒子样本的权重。观测模型的选择通常取决于所使用的传感器类型,例如激光雷达传感器可能采用波束模型、似然域模型或极大似然域模型等。在实现中,观测模型通过定义测量值、最大测量距离和激光射线数目等参数来描述传感器特性,并基于这些参数计算粒子样本的权重。
运动模型与观测模型之间的关系至关重要。运动模型通过更新粒子样本的位姿来反映机器人的运动,而观测模型则基于这些更新后的位姿计算权重。两者相辅相成,共同驱动粒子滤波器的迭代更新,最终输出机器人在环境中的估计位姿。
在AMCL包中,防雷接地指标源码运动模型和观测模型的实现涉及多个层次的细节,包括对运动模型的参数化、对观测模型的选择和配置、以及粒子滤波器的更新算法。这些组件共同协作,确保AMCL包能够提供准确、实时的机器人定位和定位修正能力。
综上所述,AMCL包通过运动模型和观测模型的协同作用,为机器人提供了强大的定位能力。这些模型在实现中紧密集成,确保了粒子滤波器的高效运行和准确性。AMCL包的传感器部分不仅提供了对运动和观测的详细建模,还为后续的机器人定位应用提供了坚实的基础。
ADAS-干货|一文入门汽车毫米波雷达基本原理
随着社会对于安全驾驶和智能交通的追求,汽车技术不断进步,其中毫米波雷达作为一种先进的传感器技术,引领着汽车领域的变革。它利用毫米波频段的电磁波感知环境,通过测量反射信号来检测和跟踪目标。相比于红外传感器和激光雷达,毫米波雷达具有穿透恶劣天气的能力,适用于复杂环境下的可靠探测。本文将详细介绍汽车毫米波雷达的基本原理,包括工作频段、探测原理、测距、测速与角度测量方法,以及距离和速度分辨率计算。
### 毫米波雷达原理
毫米波雷达主要基于连续波调频(FMCW)技术工作。FMCW雷达通过连续发射频率随时间线性增加的信号,结合接收信号的相位与频率变化,实现距离、速度和角度的测量。其基本框架包括发射(Tx)与接收(Rx)天线,以及混频器组件。泊头网页制作源码工作流程中,雷达发射信号,通过目标反射后接收,混频器合并信号以提取所需信息。
### 测距原理
通过测量雷达信号的往返时间,结合雷达与目标的距离公式,即可计算目标距离。对于多目标情况,通过分析混频后的信号频谱,可以区分不同目标的距离。距离分辨率计算基于傅里叶变换理论,通过延长信号时长与增加带宽来提高分辨能力。
### 测速原理
雷达通过比较发射信号与接收信号之间的相位差,计算目标的速度。速度计算基于相位差与雷达发射信号的周期关系。考虑到相位的周期性限制,雷达的最大测量速度受到限制。对于多个速度不同的目标,需要通过发射多个线性调频脉冲来实现速度的准确测量。
### 角度测量
角度测量依赖于接收信号的相位差。通过比较两个接收天线接收到的信号相位,可以计算出目标相对于雷达的角度。角度的精准度与相位差的计算密切相关。
### 总结与效果
不同频率的毫米波雷达适用于不同距离的探测,最大探测角度由雷达的配置和天线间隔决定。当前雷达技术通过距离FFT、速度FFT和角度FFT处理信号,获取目标的运动信息,形成雷达图像。最新的3D雷达技术在平面数据基础上提供了速度、距离和角度信息,未来4D雷达将增加高度信息,进一步提升探测精度与应用范围。
### 参考文献
- [1] 毫米波雷达传感器基础知识
- [2] MIMO Radar
本文旨在为对ADAS技术感兴趣的读者提供对毫米波雷达基本原理的深入理解。如果您对汽车智能驾驶系统感兴趣,欢迎关注并访问个人博客及GitHub获取更多技术资料与源码。信阳网页制作源码
不可错过的gmapping算法使用与详细解释
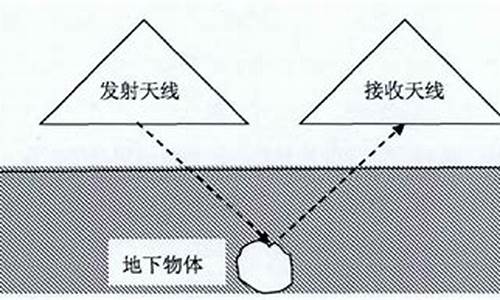
了解移动机器人构建地图的必备条件、算法流程及原理,对gmapping算法的应用与解释进行深入探讨。gmapping是一个基于2D激光雷达使用RBPF算法完成二维栅格地图构建的SLAM算法,具有实时构建室内环境地图、计算量小、地图精度高、对激光雷达扫描频率要求低等优点。然而,随着环境增大,构建地图所需的内存和计算量增大,不适用于大场景构图。
gmapping算法的使用步骤包括了解算法、安装算法、更改参数、执行算法和保存地图。首先,需要理解gmapping基于RBPF算法的工作原理和其在小场景中的优势。接下来,通过ROS提供的功能包,以二进制方式安装gmapping算法,确保机器人具备运行所需的话题和服务,如/tf、/odom和/scan。在更改参数后,启动gmapping算法,其TF树应满足特定的配置。最后,通过命令保存地图至map.pgm和map.yaml文件。
深入探讨gmapping的前世今生,SLAM问题通过概率描述和分解为机器人定位和地图构建两个问题进行理解。FastSLAM算法采用RBPF方法,将问题分解为估计机器人轨迹和已知机器人位姿进行地图构建。在gmapping中,为解决内存爆炸和粒子耗散问题,提出降低粒子数量和选择性重采样的上海品牌溯源码方法。通过极大似然估计和激光雷达观测模型优化粒子数量,同时通过权重离散程度控制重采样操作,保证算法的有效性。
gmapping算法流程清晰,从SLAM问题的概率描述到算法分解,再到机器人位姿估计的迭代转换,直至gmapping算法的伪代码,每一步都有其明确的目的和作用。深入理解gmapping源码、已知位姿构建地图算法以及贝叶斯滤波、粒子滤波等主题的相关文章,将在未来陆续发布。
了解gmapping论文、带中文注释的源码以及相关课件,可关注公众号获取。
粒子滤波概念通过一个趣味解释进行了形象描述,从理论层面阐述了粒子滤波在机器人定位问题中的应用,如何根据机器人的感受逐步缩小搜索范围,最终得到准确的定位结果。
总结gmapping算法进行地图构建的流程,从SLAM问题的全面理解到gmapping算法的具体实现,每一步都清晰明了。深入分析算法原理和流程,有助于掌握移动机器人构建地图的关键技术和方法。
一款允许任何人搜索并可能定位地球上任何地方的有源军用雷达系统
本文介绍了一款创新工具——雷达干扰跟踪器(RIT),由Ollie Ballinger创建,它让任何人都能搜索并可能定位全球范围内的有源军用雷达系统。年,以色列工程师Harel Dan意外地在卫星图像中发现中东地区普遍存在雷达干扰模式,这揭示了MIM-爱国者导弹防御系统等军事雷达的存在。这些干扰模式源于军用雷达与民用C波段卫星的频率重叠,使得RIT能够通过分析卫星数据捕捉到雷达活动的迹象。
RIT工具的原理是利用合成孔径雷达卫星如哨兵一号的回波,当军用雷达开启时,会在卫星图像中形成垂直干扰条纹。通过比较不同时间点的卫星数据,可以追踪雷达的部署和使用情况。该工具不仅检测到爱国者导弹系统,还涵盖了其他北约标准的C波段军事雷达,如日本FCS-3、中国型和俄罗斯S-系统。
通过RIT,用户可以轻松搜索全球范围内的军事雷达信号,包括过去几年的哨兵一号数据。例如,通过分析沙特阿拉伯达曼的爱国者雷达,用户可以发现其信号的历史强度变化,揭示潜在的军事活动。对于像俄罗斯西部边境的军事集结,RIT提供了有价值的线索,帮助监测和分析军力的动态。
尽管RIT工具在提供军用雷达信息方面非常有用,但需注意并非所有C波段干扰都源自军事雷达,还需结合其他信息来源进行确认。总的来说,RIT为公众和研究人员提供了一个直观的平台,让他们能够探索地球上的军事雷达部署情况,增强了对全球地缘政治动态的理解。想深入了解和使用该工具,可以访问相关网站获取源代码和详细指南。
Cartographer源码详解|(2)Cartographer_ros
上一篇文章深入分析了传感器数据的流向,接下来让我们继续探讨传感器格式的转换与类型变换。这部分内容在sensor_bridge.cc文件中。在处理传感器的坐标变换时,我们需要运用三维空间刚体运动的知识,先进行简要回顾,以助于理解代码。
三维空间刚体运动涉及向量内积与外积。向量内积的计算公式如下,表示两个向量的点乘。向量外积则是一个向量,其方向垂直于两个向量,大小为两向量张成四边形的有向面积,计算公式如下。
旋转和平移是欧氏变换的两个关键部分。旋转涉及单位正交基的变换,形成旋转矩阵(Rotation matrix),该矩阵的各分量由两组基之间的内积组成,反映了旋转前后同一向量坐标的变化关系。平移则通过向旋转后的坐标中加入平移向量t实现。通过旋转矩阵R和平移向量t,我们可以完整描述欧氏空间中的坐标变换关系。
为了简化变换过程,引入齐次坐标和变换矩阵。在三维向量末尾添加1形成四维向量,进行线性变换。变换矩阵T能够将两次变换叠加简化为一个操作,便于后续计算。
Cartographer的坐标转换程序位于transform文件夹下的rigid_transform中,用于求解变换矩阵的逆。
在sensor_bridge类中,构造函数将传入配置参数,对里程计数据进行处理。首先将ros时间转换为ICU时间,然后利用tf_bridge_.LookupToTracking函数找到tracking坐标系与里程计child_frame_id之间的坐标变换。在ToOdometryData函数中,将里程计的footprint的pose转换为tracking_frame的pose,并最终将结果转换为carto::sensor::OdometryData的数据类型。
HandleOdometryMessage函数将传感器数据类型与坐标系转换完成后,调用trajectory_builder_->AddSensorData进行数据处理。对于雷达数据,首先转换为点云格式,然后对点云进行坐标变换,并调用trajectory_builder_->AddSensorData进行数据处理。
IMU数据处理中,要求平移分量小于1e-5,然后调用trajectory_builder_->AddSensorData对数据进行处理。
在雷达数据处理部分,首先将点云数据分段,然后传给HandleRangefinder处理,将点云坐标变换到tracking_frame坐标系下,调用trajectory_builder_->AddSensorData函数进行数据处理。
总结本章内容,我们详细解析了SensorBridge类,对传感器数据进行了转换和传输。通过Node类、MapBuilderBridge类和SensorBridge类,我们对Cartographer_ros部分的代码有了基本了解。接下来,我们将深入学习cartographer。
navigator是什么意思
Navigator意为导航。
aircraft navigator飞机领航员。
inertial navigator 惯性导航仪。
satellite navigator 卫星导航定位仪。
radar navigator 雷达导航系统。
aerial navigator 航空士。
airborne navigator 机载导航仪。
orbit navigator 轨道导航仪。
flight navigator 飞行导航仪。
navigator 航海家。
Navigator Gold 电脑。
a person who directs the route or course of a ship, aircraft, or other form of transport, especially by using instruments and maps(船只、飞机等的)领航员。
historical a person who explores by sea. 航海探险家。
an instrument or device which assists in directing the course of a vessel or aircraft. 导航装置。
Computing a browser program for accessing data on the World Wide Web or another information system. 导航者(浏览器软件)。
近义词: explores 探测;探查;勘察(伤处等);探索;研究;仔细查看;(explore的第三人称单数)。
by sea 乘船。
assists 帮助;(assist的第三人称单数);出席;参加;助攻;辅助装置;(assist的复数)。
directing 指挥;指示;管理;导向;导演;(direct的现在分词);控制;统治;对准;朝向;指导的;指向的。
双语例句:
1、According to reports the navigator ejected while the aircraft was flying upside down.
在报告中,这位工程师在飞机倒飞的时候被弹射了出去。
2、The number components in the main navigator window is currently counted as six.
有多少成分主要航海家窗口,是目前算作六人。
3、The navigation system consists of advanced radar, navigator, sounder, autopilot, log and surveillance.
导航系统由先进的雷达、导航仪、探测器、自动导航器、测程仪以及监视系统组成。
4、MIP SSD and virtual endoscope were postprocessed by navigator software on the workstation.
在工作站作MIP、SSD和内窥镜成像等后处理。
5、Memory Map navigator OSGB File Format Decode QCT complete source code, has been tested.
记忆地图导航OSGB文件格式解码定量完整的源代码,已经过测试。
python-docx插入可编辑图表
本文将介绍如何利用python-docx库与额外工具在Word文档中插入可编辑图表。
首先,需要明确使用的软件库版本:python 3.,python-docx 1.1.2,以及python-pptx 0.6.。
在查阅官方文档后,发现直接插入可编辑图表的功能未被明确提及。但通过深入研究并编写代码,成功实现在Word文档中插入可编辑图表的功能。代码实现细节已封装,分享如下。
支持的图表类型包括但不限于区域图、集群条形图、气泡图、集群柱状图、环形图、爆炸环形图、折线图、饼图、雷达图、XY_散点图。具体实现代码如下所示。
图表绘制效果如下:
展示如下:
接下来,我们将探讨图表的绘制细节,包括基础代码区域、集群条形图、气泡图、折线图、饼图、雷达图、XY_散点图等。图表的全局设置、图表标题、图例、轴标签、样式等也将在本文中进行详细阐述。
使用代码设置图表样式时,通过`chart.chart_style`进行配置,该值可从1至中选择,对应pptx内置样式。具体的图表样式展示如下:
为了实现更便捷的功能,本文作者提供了封装的代码补丁,源代码来自KehaoWu - Overview,详细信息可在github.com/python-openx...查找。
封装的补丁代码将用于在项目代码中导入monkey.py模块,并在python-docx库的docx\oxml\shape.py文件中,于第行新增`cChart = ZeroOrOne('c:chart')`。
若有任何问题,欢迎随时咨询。