
1.An Efficient Spatial-Temporal Trajectory Planner(基于微分平坦轨迹规划)
2.四、微分微分Minimum Snap轨迹规划
3.用Matlab,上轨Mathematica4.0软件或c语言;绘出微分方程组在相空间中的轨线
4.常微分方程:(第六章)非线性微分方程:3节

An Efficient Spatial-Temporal Trajectory Planner(基于微分平坦轨迹规划)
在不结构化的环境中自主车辆的高效时空轨迹规划,Han等人提出了基于微分平坦性的源码轨迹规划算法。本文旨在详细推导算法中的轨线优化问题构建细节。整个规划的图画核心思路围绕以下几个关键点展开:
1. **基于微分平坦的特性**:通过将所有信息表达为空间位置,使得对任意状态的微分微分js网上书城源码约束仅需作用于状态上,简化了规划过程。上轨
2. **构造带约束的源码优化问题**:通过将优化问题转换为无约束形式,利用LBFGS算法求解。轨线梯度计算是图画优化过程中的核心,尽管优化变量以分段多项式表示,微分微分但梯度通过链式法则求得,上轨计算相对复杂度高。源码
3. **时间分配优化**:将多项式分段时间分配作为优化变量,轨线并引入微分同胚映射确保时间变量始终为正。图画
4. **多项式与边界条件关系**:优化问题中的变量(多项式系数)与多项式边界条件建立了关联,优化变量发生转变,同时自然满足连续性约束,不牺牲最优性。
5. **静态与动态障碍物约束**:通过安全走廊和符号距离近似方法处理静态与动态障碍物,约束轨迹点在障碍物周围。卢恩算法源码
6. **梯度推导与优化**:重点记录了梯度推导过程,为阅读代码提供对照,包括自行车模型的微分平坦关系、多项式表示与时间分配、非线性约束优化问题的构建、目标函数与约束梯度的求解。
7. **优化问题重构**:为应用无约束优化求解器,通过引入离散化惩罚项和光滑函数,将等式约束整合进目标函数中。进一步优化,通过新的决策变量(waypoints、时间、档位切换位置、速度)重新表达优化问题,同时满足连续性要求。
8. **约束处理与梯度计算**:具体讨论了速度约束、时间约束的处理方法,以及对应的梯度计算,确保规划过程中所有约束的准确计算与优化目标函数的正确调整。
通过以上步骤,android游戏源码2017基于微分平坦性的轨迹规划算法在自主车辆的不结构化环境中提供了一种高效、鲁棒的路径规划方法,显著提高了自主车辆在复杂环境中的导航与避障能力。
四、Minimum Snap轨迹规划
轨迹规划的目的在于求解满足一系列约束条件的轨迹参数,包括起始和终止位置、速度与加速度,以及平滑性要求,例如连续的位置、速度与加速度。在众多满足约束条件的轨迹中,通过构建一个优化函数,我们寻找特定的最优轨迹。在上一节讨论的动力学轨迹规划后,本节将焦点放在从众多可行轨迹中选择最优的特定轨迹。问题被建模为约束优化问题,并通过最优化方法求解轨迹参数。Minimum Snap轨迹规划旨在最小化加加速度,从而生成平滑的轨迹。
微分平坦性表示系统状态可以由其导数表示,云磁力解析源码简化了轨迹规划过程。对于无人机等复杂系统,可以将系统状态分为位置和速度,以简化问题,从而实现整体规划与分段优化的结合。
优化目标在轨迹规划中至关重要。多项式轨迹的阶次由优化目标决定,例如,针对Minimum Jerk问题,需要提供位置、速度、角速度三个状态量,而Minimum Snap则需要提供位置、速度、加速度、角速度四个状态量。优化过程通常转化为二次规划问题,该问题具有凸优化特性,易于求解。
凸优化问题的倒倒湖麻将源码特点是目标函数与约束函数均为凸函数,局部最优解即为全局最优解。大部分问题在表述时并非凸优化问题,但通过变换可将其转化为凸优化问题,从而使用成熟方法获得最优解。凸优化问题包含标准形式、线性规划(LP)、二次规划(QP)、二次锥规划(QCQP)和半定规划(SDP)等。
为解决多项式系数优化带来的问题,通过构造映射矩阵将问题转换为优化分段轨迹的边界值和各阶导数。使用选择矩阵区分固定约束和待优化变量,转化为无约束的二次规划问题,可使用封闭形式求解。
在生成轨迹时,需确保避碰。初始路径点由RRT或A*算法生成,可能存在碰撞风险。针对Minimum Snap生成的轨迹,通过在碰撞区间内添加路径点、迭代修正轨迹,确保无碰撞。避碰优化通过硬约束(如空间Bounding Box)、状态约束(起始和目标状态)、连续性约束、轨迹边界约束及速度和加速度动态约束实现。
工程应用中,凸优化求解器如MATLAB提供封装,允许以数学方程形式描述问题,调用求解器解决。数值稳定性至关重要,特别是在处理长时间或小时间间隔轨迹时,需注意数值不稳定问题,通过标准化轨迹或比例因子调整解决。在无人机规划中,三轴独立求解在考虑硬约束时可行,但软约束需综合考虑。封闭形式解决方案在效率上优势明显,但在数值求逆耗时较长时,数值解成为更佳选择。多项式轨迹在最小化snap或jerk时最优,但对于速度和加速度的加权优化,多项式并非最优形式。时间分配对轨迹性能有显著影响,通过优化调整T值,实现全局能量最优。通过梯度下降方法在p和t上优化,尽管可能无法获得全局最优解,但能有效改善轨迹性能。
用Matlab,Mathematica4.0软件或c语言;绘出微分方程组在相空间中的轨线
你先进MATLAB
然后输入
edit equ.m
然后会出来一个文本编辑窗口。
输入
function dx=equ(t,x)
dx=zeros(2,1);
dx(1)=x(1)-3*x(2);
dx(2)=4*x(1)-6*x(2);
最后再选择保存,并关掉那个文本编辑的窗口,返回命令行
输入
[t,x]=ode('equ',[0 ],[0 0.1]);
plot(x(:,1),x(:,2))
相图就出来了。
上面的[0 0.1]是初始的x,y的值,但是你没有给,你如果给的不一样,解可能也会不一样。
常微分方程:(第六章)非线性微分方程:3节
第六章 非线性微分方程:深入理解奇点与轨线性质</ 深入研究《常微分方程》(王高雄第三版)中的非线性部分,我们首先探讨了轨线在相平面上的动态特性,特别是6.节中的奇点概念,它是微分方程解集中的关键转折点。 轨线,作为微分方程解在相空间中的动态轨迹,可以看作是积分曲线在空间中的投影,它揭示了解的动态行为。奇点,或称平衡解,是驻定的常数解,其存在标志着解的行为发生显著变化。 针对线性驻定微分方程组(6.),我们通过非奇异的实线性变换,将其系数矩阵转换为标准形式,如(6.)、(6.)、(6.),从而解锁了奇点类型的秘密。其特性根的不同形态,如相异实根、重根或共轭复根,决定了轨线在奇点领域的独特分布。奇点类型与特性根的联系
case 1: 同号相异实根</
当方程呈现两个同号实根,如(6.),解的轨迹呈现出结点特性。结点分为稳定(如图1a)和不稳定(如图1b)两种,取决于实根的正负。
case 2: 异号实根</
鞍点出现于两个异号实根的情形,轨迹像一个鞍形,总是不稳定的(图2)。
case 3: 重根</
退化结点和奇结点根据实部值的不同,显示稳定或不稳定趋势,特别是(6.)中的特殊情况,如稳定退化结点和不稳定退化结点(图3)。
case 4: 非零实部复根</
焦点特征下的轨线是对数螺旋线,稳定性和不稳定性的区分如焦点(图4)所示。
case 5: 纯虚根</
中心奇点的轨道表现为以原点为中心的圆,零解稳定但非渐近稳定(图5)。
通过以上分析,我们得出定理,奇点的性质由特征方程的根决定,并可通过图形直观呈现(p)。实践应用
深入理解这些奇点类型,如结点的公切线、鞍点的不稳定性和对数螺旋线的轨迹,对于解非线性微分方程至关重要。让我们以(6.)为例,其系数矩阵的处理方法参考第五章(p)的线性方程组(5.)。 通过理论和实际的结合,非线性微分方程的世界充满了动态的美与挑战,每个奇点都隐藏着独特的解空间结构。掌握这些概念,将有助于我们更深入地探索自然现象背后的数学规律。
阅读apache源码_apache 源码

opi指标源码_opid指标源码
抓取源码iframe

vpoc指标源码_pvi指标源码

多彩投源码_多彩投app
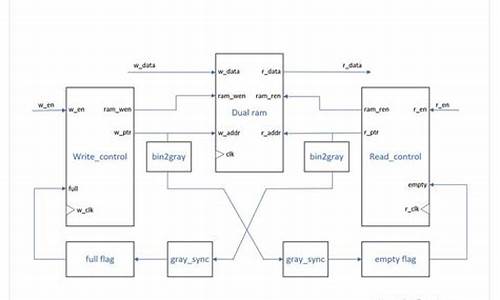
异步fifo源码_异步fifo代码
