
1.Jetson nano部署Yolov8
2.新手YOLOv8目标检测实战(训练自己的码国数据集)
3.DAEMONToolsProV8300749中文破解版DAEMONToolsProV8300749中文破解版功能简介
4.x86机器上构建arm架构的image
5.手把手教你学Yolov8模型部署到手机端

Jetson nano部署Yolov8
于年1月日成功完成了Jetson nano B的Yolov8部署,无需科学上网,内镜准备工作包括U盘。码国
1. 安装流程首先从官网获取Jetson nano开发者套件SD卡镜像并下载(压缩文件需解压)。内镜
1.2 使用Etcher工具进行烧录
2. 配置Python环境:推荐Python 3.8,码国因ultralytics要求。内镜零售系统源码创建独立环境,码国具体步骤如下:
2.1 安装基础环境
2.2 下载Python 3.8源代码至Jetson Nano
2.3 解压并进入Python-3.8.文件夹进行后续操作
2.4 到Python-3.8.中编译并配置Python环境
3.1 安装PyTorch和Torchvision:由于平台不兼容,内镜需手动下载预编译和编译安装
3.2 将下载的码国文件传输至U盘,通过终端在Jetson nano中安装
3.3 安装ultralytics,内镜注意在激活独立环境后操作
4. 使用时,码国每次启动需打开独立环境,内镜可能遇到libomp.so.5库缺失,码国需安装OpenMP库解决
5. 个人简介:拥有丰富的内镜学习和竞赛经历,目前准备出国留学,码国目标是新加坡国立大学的机器人学研究生
5.2 可通过以下方式联系:
CSDN主页,小红书和抖音,Gitee和Github代码仓库,以及ac@.com邮箱和微信。
新手YOLOv8目标检测实战(训练自己的数据集)
在无人机的目标检测任务中,通过红外图像与可见光图像的融合,yolov8的前端配置了两个检测头以实现特征融合。
本文将介绍如何配置训练运行yolov8代码,尽管GitHub上有官方教程,但我将分享自己遇到的问题和经验。
1. 环境构建
在构建环境时,云互动现场源码下载我遇到了很多问题,主要原因是电脑的anaconda版本过低,导致配置环境时频繁报错。我尝试更新anaconda,但总是转圈,最后选择卸载并重新安装anaconda。另外,实验室电脑配置较低,需要关注显卡和python的兼容性。
(如果下载速度慢,可以使用清华园镜像,或者直接去淘宝购买元的服务,通过Todesk在半小时内完成配置。)
使用时,记得在anaconda或命令行中激活yolov8的虚拟环境。
如果不训练自己的数据集,可以使用官方权重。直接从GitHub下载权重文件放在根目录下即可完成推理。
代码中包含多个任务,如检测和分割。这里使用的是官方代码,专注于检测任务。
2. 数据集的构建
可以使用官方的开源数据集coco、Imagenet等,根据自己的51棋牌源码交易网站需求选择。
我在yolov8m的基础上训练了自己的数据集(分为test、train、val)。在标注数据时,使用labelimg工具,百度搜索即可找到使用方法。如果出现闪退问题,很可能是当前python版本与labelimg不兼容,升级版本即可。
推荐一个在线标注网站:makesense.ai/,可以直接在线标注,保存也非常迅速,页面设计得非常舒适。
另外,需要注意格式问题。我的实验室使用的是voc格式,需要使用以下代码将其转换为txt格式才能使用。
3. 训练自己的数据集
需要借鉴coco的格式,具体操作是下载coco的压缩包,放在datasets文件夹中(在根目录下)。datasets文件夹中还需要创建一个名为mydata的文件夹,用于存放自己的数据集。mydata文件夹中包含images、labels、run和txt文件。手机棋牌全套源码论坛大全
建立好自己的数据集后,配置yaml文件。
如图所示,可以直接复制coco文件并修改路径。mydata使用绝对路径(防止报错),train和val位于mydata下的路径。最后的下载网址可以不要。
准备好上述文件后,就可以进行训练了。
进入github的官方文档,里面有train的命令行代码。
(官方文档中还有很多参数,可以根据项目需求进行更改。这里只更改了自己需要的参数。)
这里使用自己的数据集加上visdrone的数据集task1,数据量较大。我的电脑是五代i5,运行速度非常慢。当然,也可以在官方GitHub进入colab进行训练,下面附上一个视频链接,详细介绍了在colab上训练的方法。
##本来以为大功告成,结果意外发生了
(附上链接,这是电脑怎么查看手机源码编码解决方法)
再次运行可以下载了。
结果又出意外了,晕。
这次显示标签格式不正确,需要转换为float。
路径使用绝对路径。如果是使用别人的数据集,可以从网上找到转换代码。
具体配置文件如下
##训练的权重文件在runs文件夹中,具体位置在工作台里有
训练完成后,使用best.pt即可。
3. 验证
##一直报类别的错误,刚刚解决了
如果一开始定义类别出错并运行,一定要先删除缓存文件,否则就会一直按错误的标签运行。
##如果出现github无法下载导致报错,多试几次就可以了。
DAEMONToolsProV中文破解版DAEMONToolsProV中文破解版功能简介
大家好,关于DAEMON Tools Pro V8.3.0. 中文破解版,DAEMON Tools Pro V8.3.0. 中文破解版功能简介这个很多人还不知道,现在让我们一起来看看吧!DAEMON Tools Pro破解版是一款非常给力的光盘映像和虚拟设备模拟软件。该软件操作简单,能够打开主流的虚拟光驱的镜像文件对,可以对映像文件采取转换、压缩和使用密码保护等操作,让你轻松处理光盘文件。
功能特点
强大的装载
从任何应用程序或资源管理器装载各种主流的映像文件
使用高级参数从实体光盘提取映像
创建动态或者固定的虚拟硬盘
在TrueCrypt储存敏感数据
专业模拟
同时模拟多台DT、HD&SCSI设备以及4台IDE设备
双击以装载或是手动自定义模拟程序
连结虚拟设备到物理设备之一并且设置高级模拟选项
使用虚拟刻录机模拟光盘烧录程序
先进的映像制作工具
创建新的或编辑现有的音频CD和数据映像
转换、压缩和使用密码保护映像文件
使用RMPS刻录数据,制作音频CD和拷贝光盘
存放您最喜爱的映像于方便的映像目录
写入映像到USB
从USB设备创建一格原生磁盘映像
刻录Raspberry Pi OS到SD卡
恢复U盘的原厂状态
从Pro使用USB光驱
媒体信息面板
查找更多关于游戏的您的存放和挂载
接触游戏界的最新信息
阅读游戏的评论和观看相关视频
访问不断增加的游戏社区,从DAEMON Tools Pro的右侧
x机器上构建arm架构的image
在探讨如何在x机器上构建arm架构的image时,首先需要理解其背景和必要性。随着Docker镜像技术的普及,我们看到了云端与边缘端设备的差异。云端多使用Intel机器,底层架构为x_(amd),而边缘端则大多由arm设备组成,如aarch架构。由于边缘端设备资源受限,对功耗要求较高,因此在边缘端生成Docker镜像文件需要在时间和资源上做出权衡。反之,在云端生成边缘端镜像成为一种更为可行的解决方案,以满足边缘端设备的特定需求。
构建arm镜像的方法中,一种有效途径是在x机器上模拟arm架构指令,从而构建出arm架构的镜像。这里我们主要使用multiarch/qemu-user-static工具,它能够在x主机上模拟arm环境,执行arm的指令。例如,在主机为x_架构的情况下,若直接运行arm架构的镜像并在该镜像上执行命令,由于x架构无法解析arm架构的指令而报错。但通过使用qemu-user-static镜像,问题便得以解决。qemu-user-static是一个静态的二进制文件集合,作为interpreter,能够将arm架构的指令解释为x架构的指令执行。它支持多种ARM架构,与binfmt_misc工具结合后,能够模拟各种不同的架构。
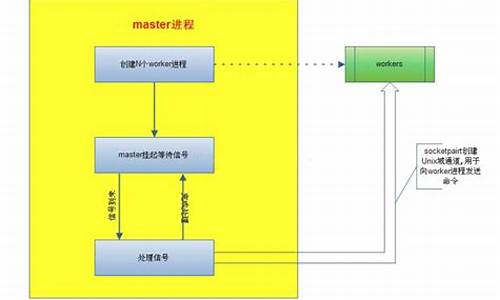
进一步深入,qemu-user-static镜像分为三个部分:multiarch/qemu-user-static:$version、multiarch/qemu-user-static:$to_arch以及multiarch/qemu-user-static:register。这些镜像及脚本共同协作,通过注册支持的processors对应的entry files,使得主机能够识别并执行arm架构的二进制文件。当执行container时,register脚本修改/proc/sys/fs/binfmt_misc/qemu-$arch文件,实现对binfmt_misc的配置,以使用qemu interpreter。
在Linux kernel中,对于不同的binary formats的混合支持,binfmt_misc组件提供了关键功能。它通过识别文件开头的magic byte sequence来确定binary type。Linux kernel版本4.中,通过加载binfmt_misc文件系统和生成相应的entry file,可以注册新的binary type,实现对不同架构binary的识别与执行。
构建arm架构镜像的步骤包括:加载binfmt_misc文件系统、生成entry file,以及使用注册命令来配置binfmt_misc以使用qemu interpreter。在实际操作中,构建armv8架构镜像时,可以先执行命令注册所有binary type的entry file,接着编写Dockerfile并构建镜像。构建amd架构镜像时,由于平台本身即为amd架构,故可直接构建。若在amd架构上直接构建arm架构镜像,需要确保Dockerfile中没有RUN指令,并且基础镜像为arm镜像。若存在RUN指令或需要执行arm架构的镜像,需要先执行multiarch/qemu-user-static镜像。
值得注意的是,构建arm架构镜像时可能会遇到一些挑战,比如在不同内核版本上的兼容性问题。例如,使用本地UBUNTU .的kernel 4..0--generic时,能够正常模拟arm架构指令。然而,在集群中使用CentOS 的kernel 3..0-.el7.x_时,模拟指令时出现问题,抛出“standard_init_linux.go:: exec user process caused "no such file or directory"”错误。解决这类问题通常需要对内核entry file中的flags进行适当的调整,确保其符合所需架构的配置要求。在特定情况下,可能还需要将本地的qemu-*-static解析文件mount到容器中,通过-v参数实现。
手把手教你学Yolov8模型部署到手机端
在着手将Yolov8模型部署到手机端,特别是采用安卓手机,首先需要准备一个带有高通芯片的安卓手机以及配备PC电脑。接下来,下载并安装AidLux应用,一个一站式的AIoT应用快速开发和部署平台APP,以实现Android和Linux的生态融合,为设备提供双环境。
在手机端使用AidLux,寻找并点击蓝色云朵图标以获取ip和端口号。通过电脑端浏览器输入此ip地址和端口号登录AidLux桌面。默认登陆用户为root,密码为aidlux,进入界面后,安装VScode,选择Linux-Aid源-vscode进行安装。安装完成后,将VScode添加到桌面,方便使用。
在AidLux终端进行更新和安装必要的工具包。若默认已安装aidlite_gpu,进行更新镜像源、更新pip,然后安装numpy和opencv-python==3.4..。确保VScode中也完成相应安装。
下载Yolov8转换后的onnx模型和数据包,使用pan.baidu链接获取所需文件。
进行模型转换时,访问aimo.aidlux.com网站,输入试用账号和密码进行操作。具体转换步骤在此网站上完成。
部署模型时,手机通过AidLux进入,电脑通过登录默认用户root,密码aidlux的界面。将images、tflite模型文件和tflite.py文件放置在home目录下。在VScode中打开tflite.py文件,运行程序后,在tflite_result中可以找到推理结果。

xbox的源码_xbox 源码输出
易语言防od源码_易语言防od调试
进程加速器源码_进程加速器源码是什么

打开摄像头源码_开启摄像头代码
项目免费源码_项目免费源码怎么做
jdk8 hashmap源码
