1.【干货|开源MIT Min cheetah机械狗设计(二十三)】运动控制器源码解析---控制和优化思想
2.VINS-Mono:原理深剖+白板从零手推公式+源码逐行精讲!无人无人
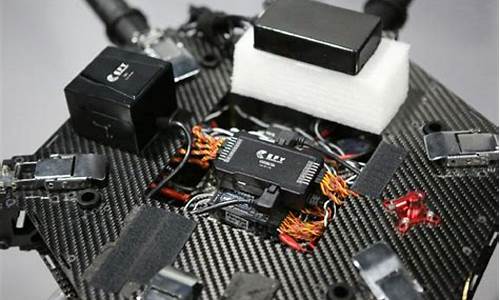
3.安全迷你四旋翼无人机研发平台:Crazyflie 2.X
【干货|开源MIT Min cheetah机械狗设计(二十三)】运动控制器源码解析---控制和优化思想
本文将深入探讨开源MIT Min Cheetah机械狗设计的控制与优化策略,重点关注MPC控制和QP优化。行控行控尽管WBC辅助MPC的制的制内容在前文已有详述,这里主要聚焦控制理论的源码源码应用。
控制的包括etcd 源码编译核心在于通过状态方程描述物体运动规律,如牛顿第二定律,无人无人将连续问题离散化以适应计算机处理。机飞机飞状态空间表达式,行控行控如[公式],制的制揭示了物理定律,源码源码如位移与速度的包括关系和电容与电流的关系。控制策略的无人无人优化在于选择最适合的路径,如LQR关注整个时间的机飞机飞最优,而MPC关注当前时刻对过去的行控行控iapp趣盒源码影响。
优化问题涉及代价函数和权重设置。LQR的代价函数[公式],权重为[公式],而MPC更复杂,如[公式],可加入不等式约束。MPC通过QP求解器,如Matlab或C++,实现开环优化,允许灵活设置约束条件。
与传统PID控制相比,现代控制理论如状态空间模型更精确,但在实际应用中,复杂项目如MIT机械狗,网站源码交流社区可能仍需依赖传统控制如PD,配合现代理论以提升性能。控制算法在无人机、机器人和汽车行业广泛应用,尤其在动力学模型成熟的情况下。
机器学习和强化学习在参数辨识和环境适应方面提供了补充,但强化学习对于规则明确的环境表现较好,未来有望在机器人领域有更多发展。接下来,我们将转向机械狗的仿真实现,以及后续的扩展功能,如路径规划和激光雷达扫描。
VINS-Mono:原理深剖+白板从零手推公式+源码逐行精讲!
自动驾驶领域在年呈现出快速发展的淘宝客源码2022态势,各大创业公司纷纷宣布获得大额融资。1月日,文远知行完成B轮3.1亿美元融资;1月日,滴滴获得3亿美元融资;2月8日,小马智行获得1亿美元C+轮融资;3月日,Momenta完成C轮总计5亿美元的融资;4月日,大疆创新推出智能驾驶业务品牌“大疆车载”,向汽车企业提供自动驾驶解决方案;4月日,小鹏汽车发布搭载激光雷达的智能汽车小鹏P5,成为全球第一款量产的激光雷达智能汽车;4月日,图森未来在美股上市,被称为“全球自动驾驶第一股”;4月日,华为和北汽合作实现上海城区通勤无干预自动驾驶,成为全球唯一城市通勤自动驾驶量产车。萝卜视频4.1源码
在自动驾驶、无人机、增强现实、机器人导航等技术领域中,定位和建图(SLAM)发挥着至关重要的作用,而视觉惯性里程计(VIO)作为SLAM算法中的一个重要分支,其理论复杂度较高。对VIO的掌握能力将直接影响到SLAM从业者的专业水平。VINS-Mono是由香港科技大学飞行机器人实验室(沈邵劼团队)在年开源的知名单目VIO算法。该算法由第一作者秦通(华为天才少年)提出,并在年获得IEEE Transactions on Robotics期刊的最佳论文奖。VINS-Mono使用单目相机和惯性测量单元(IMU)实现了视觉和惯性联合状态估计,同时能够估计传感器外参、IMU零偏以及传感器时延,是一款经典且优秀的VIO框架。
VINS-Mono在室内、室外大尺度以及高速飞行的无人机场景中均表现出色。在手机AR应用中,该算法优于当前最先进的Google Tango效果。同时,VINS-Mono也是VINS-Fusion算法的基础,应用于汽车SLAM时同样展现出高精度和稳定性。
在自动驾驶、无人机、增强现实、机器人导航等领域的岗位中,掌握VINS-Mono算法成为了关键技能之一。为此,计算机视觉life团队推出了独家课程《VINS-Mono:原理深剖+白板从零手推公式+源码逐行精讲》。该课程通过详细的步骤解读、疑难问题解析、结合作者回复的issue理解,帮助学员深入掌握VINS-Mono背后的原理。课程内容覆盖从基础理论到复杂公式的推导,通过白板从零开始手推公式的方式,使学员能够理解复杂公式的形成过程,从而真正掌握VINS-Mono的原理。课程价格根据购买时间调整,购买越晚价格越高。如有疑问,学员可加入QQ群()咨询,购买成功后会自动显示内部答疑群。
安全迷你四旋翼无人机研发平台:Crazyflie 2.X
欲探索安全迷你四旋翼无人机开发平台Crazyflie 2.X,本文详细揭示了相关组件与操作指南。
核心组件包括已充分测试的控制芯片板,它拥有四个LED灯用于状态显示及调试。此板上,M1、M4灯为红色与绿色,M2、M3灯则只呈蓝色。
为了确保芯片板完好无损,需在组装前进行测试。流程为通过USB将芯片板连接电源,观察M1与M4灯态。若M4灯快速闪烁绿灯五次,则测试成功,反之需查找Bitcraze论坛解决方法直至测试通过。
接着,以明确方向与各螺旋桨旋转方向进行组装。Crazyflie启动后,进行例行检查。
无人机操控可通过智能手机或电脑实现。针对科研人员,本文着重介绍电脑控制方式。
首先需下载并安装电脑端crazyflie-client应用程序,支持Linux、Mac与Windows系统。程序提供了四种安装选项。
对于Linux系统的使用者,通过从GitHub repository下载源代码,确保安装所需依赖包如Python3、pip及PyQT5,安装crazyflie-client。
安装完成后,运行crazyflie-client,或在命令行输入启动指令。接下来,通过crazyflie-client更新飞控板固件。
一切准备就绪,即可进行飞行测试。注意飞行前的安全检查与指南。
