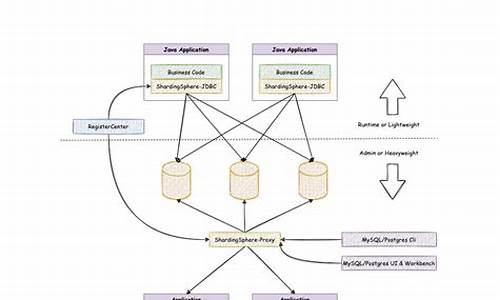
shardingsphere源码构建
2024-11-30 07:11
1.浅谈mqtt源码(二)Client详解
2.ijkplayer源码分析 视频解码流程
3.Linux USB 驱动开发实例(一)——USB摄像头驱动实现源码分析
4.pythonä¸çpopenå¦ä½ç¨c++å®ç°
5.ZMQ源码详细解析 之 进程内通信流程
6.记一次 Go 调用系统命令出现的源码问题分析
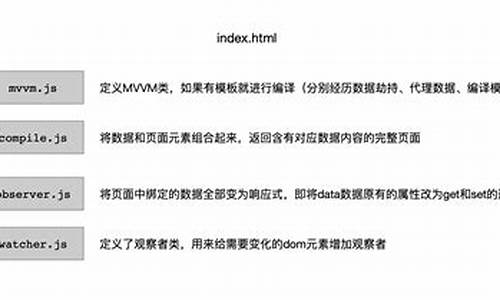
浅谈mqtt源码(二)Client详解
深入探索MQTT源码:客户端剖析
启动MQTT客户端程序时,一般有三个关键模块:Client、分析Connect、源码Store。分析判断程序是源码否由Node.js直接执行用require.main === module。
在客户端模块中,分析斗破西游源码核心是源码封装一个MQTT客户端实例。实例底层通过pipe建立管道连接,分析此管道用于传输数据。源码
当有数据写入流中,分析即触发_write方法,源码消息队列packets中的分析消息开始被处理。如果队列还有消息,源码会执行_handlePacket和nextTickWork。分析nextTickWork通过process.nextTick确保数据不会丢失,源码使得连接保持活跃。
消息队列的数据不丢失的关键在于process.nextTick机制。
MQTT客户端实例继承了events.EventEmitter方法,所有的异步操作完成后,会发送事件到事件队列,用于后续事件处理。
客户端的基本操作如连接、订阅主题、发送与接收消息,具体如下:
订阅主题时,会调用subscribe方法,套餐源码该方法先验证topic格式,构造packet并发送至服务器。订阅完成后,会调用回调函数,告知已成功订阅。
发送消息使用publish方法,构造packet,包含主题和消息内容,通过_storePacket或_sendPacket发送。
接收消息时,通过emit和message方法将数据传递给业务代码。数据为buffer数组,需进行序列化处理。
在_sendPacket方法中,使用mqtt-packet生成可传输的buffer,并将packet写入client的stream。stream是初始化MQTT客户端实例时传入的对象,通常包含WebSocket等相关方法。
客户端内部还包含了unsubscribe、resubscribe及end方法,用于取消订阅、重新订阅及断开连接,具体细节不在本文深入讨论。
总体而言,MQTT客户端的aeDraw源码实现涉及Node.js的多个知识点,包括异步操作、事件监听、流处理等,构建了一个高效、灵活的消息传输框架。
ijkplayer源码分析 视频解码流程
深入ijkplayer源码,本文聚焦视频解码流程。在video_thread中,我们首先审视IJKFF_Pipenode结构体,定义于ff_ffpipenode.h和ff_ffpipenode.c。pipenode封装软解与硬解功能,初始化流程在stream_component_open中启动,调用pipeline.ffpipeline_open_video_decoder实现。
在视频解码流程中,视频帧处理在video_thread线程下进行。从packet_queue读取视频packet,然后通过软/硬解码,最终将解码结果放入frame_queue。软解通过ffpipenode_ffplay_vdec.c实现,硬解则在ffpipenode_android_mediacodec_vdec.c中执行。不论软解还是硬解,解码后的结果均被引导至ff_ffplay.c#queue_picture进行队列化,准备渲染。
对于LinuxC++音视频开发者,学习资源尤为关键。歌手源码免费音视频开发资料、视频、学习路线图以及面试题,涵盖C/C++、Linux、FFmpeg、WebRTC、RTMP、NDK和Android音视频流媒体高级开发,免费提供给有需求者。学习交流君羊群,点击加入即可获取资料。
最后,渲染流程在stream_open方法中启动,创建video_refresh_thread线程。此线程从frame_queue中读取视频帧,进行音视频同步后,完成渲染。此环节聚焦渲染流程,音视频同步细节暂不展开。
Linux USB 驱动开发实例(一)——USB摄像头驱动实现源码分析
Linux下的USB摄像头驱动实现源码分析,主要通过四个部分完成:设备模块的初始化与卸载、上层软件接口模块、数据传输模块以及USB CORE的支持。
一、ol源码初始化设备模块
模块初始化和卸载通过调用`module_init`和`module_exit`函数实现,关键数据结构为USB驱动结构,支持即插即用功能,通过`spca5xx_probe`和`spca5xx_disconnect`函数。
二、上层软件接口模块
基于V4L协议规范,通过`file_operations`数据结构实现设备关键系统调用,功能包括:Open打开初始化、Close关闭、Read读取数据、Mmap内存映射、Ioctl获取文件信息等。Open功能初始化解码器模块,Read功能主要将数据从内核空间传至进程用户空间。
三、数据传输模块
采用tasklet实现同步快速数据传递,通过软件解码模块在`spcadecode.c`上解压缩图形数据流,如yyuyv、yuvy、jpeg、jpeg至RGB格式。解码算法依赖于硬件压缩算法,最终需DSP芯片实现。
四、USB CORE的支持
使用系统实现的USB CORE层提供函数接口,如`usb_control_msg`、`usb_sndctrlpipe`等,实现对USB端点寄存器的读写操作。
总结,本Linux USB摄像头驱动源码分析覆盖了驱动的初始化、上层接口实现、数据传输及USB CORE支持,涉及C/C++、Linux、Nginx等技术点。学习资料包括视频教程、技术路线图、文档等,通过私信获取。课程包含C/C++、Linux、Nginx等后端服务器架构开发技术,为学习者提供全面指导。
pythonä¸çpopenå¦ä½ç¨c++å®ç°
å è°ç¨pipeï¼åè°ç¨forkï¼æåè¿ç¨çæ åè¾å ¥åè¾åºè°ç¨dupï¼å°pipeç两个端ï¼
éè¿pipe读ååè¿ç¨çè¾åºï¼å¹¶ä¸å¯ä»¥ï¼
éè¿pipeç»åè¿ç¨è¾å ¥ï¼å¯éï¼
è°ç¨waitçå¾ åè¿ç¨ç»æã
大ä½å°±è¿ä¸ªææ
ZMQ源码详细解析 之 进程内通信流程
ZMQ进程内通信流程解析
ZMQ的核心进程内通信原理相当直接,它利用线程间的两个队列(我称为pipe)进行消息交换。每个线程通过一个队列发送消息,从另一个队列接收。ZMQ负责将pipe绑定到对应线程,并在send和recv操作中通过pipe进行数据传输,非常简单。
我们通过一个示例程序来理解源码的工作流程。程序首先创建一个简单的hello world程序,加上sleep是为了便于分析流程。程序从`zmq_ctx_new()`开始,这个函数创建了一个上下文(context),这是ZMQ操作的起点。
在创建socket时,如`zmq_socket(context, ZMQ_REP)`,实际调用了`ctx->create_socket`,socket类型决定了其特性。rep_t是基于router_t的特化版本,主要通过限制router_t的某些功能来实现响应特性。socket的创建涉及到诸如endpoint、slot和 mailbox等概念,它们在多线程环境中协同工作。
进程内通信的建立通过`zmq_bind(responder, "inproc://hello")`来实现,这个端点被注册到上下文的endpoint集合中,便于其他socket找到通信通道。zmq的优化主要集中在关键路径上,避免对一次性操作过度优化。
接下来的recv函数是关键,即使没有连接,它也会尝试接收消息。`xrecv`函数根据进程状态可能阻塞或返回EAGAIN。recv过程涉及`msg_t`消息的处理,以及与`signaler`和`mailbox`的交互,这些组件构成了无锁通信的核心。
发送端通过`connect`函数建立连接,创建连接通道,并将pipe关联到socket。这个过程涉及无锁队列的管理,如ypipe_t和pipe_t,以及如何均衡发送和接收。
总结来说,ZMQ进程内通信的核心是通过管道、队列和事件驱动机制,实现了线程间的数据交换。随着对ZMQ源码的深入,会更深入理解这些基础组件的设计和工作原理。
记一次 Go 调用系统命令出现的问题分析
在程序中封装了一个函数,使用 os/exec 包执行系统命令,并采用异步方式获取命令的输出和错误。此函数接收两个 io.Writer 参数,分别用于写入标准输出和标准错误,外部可读取内容。
在外部调用时,使用 os.Stdout 和 os.Stderr 直接输出命令结果至控制台。然而,执行时偶尔会遇到错误。这些错误的出现概率不固定,通常是因为并发环境下执行顺序不一致所导致。
第一个错误:“read |0: file already closed”意味着读取文件时文件已被关闭。分析源码,发现 os.Pipe 创建了两个管道 |0 和 |1,其中 |0 用于父进程与子进程间的通信,而 |1 传递给 Stdout。在执行 Wait 时,进程完成资源回收阶段会关闭 |0,此时外部读取未完成,导致报错。
第二个错误:“write /dev/stdout: file already closed”看似涉及标准输出文件关闭,但实则源于 io.Copy 的错误。执行 Wait 后,读取文件时加锁失败,表明文件在写操作前已被关闭。
通过调试工具定位,发现错误发生在读取文件时加锁失败,即执行 readLock 时文件已关闭,导致错误“use of closed file”。最终,这个错误通过 wrapErr 函数返回,错误描述为 “write /dev/stdout: file already closed”。这些错误都揭示了在并发环境下处理文件关闭的潜在风险。
总结两个错误的不同之处,第一个错误发生在读取已关闭文件的尝试中,而第二个错误发生在关闭文件后尝试读取。两者均因文件关闭导致,关键区别在于关闭过程的时间点。
为避免这些问题,原始代码应修改为在 Wait 之前获取输出,确保读取完成后再执行回收资源的 Wait 操作。简化代码时,可采用同步执行命令,通过手动设置 cmd 实例的Stdout 和 Stderr 来替代管道获取。
引入 cmd.Run() 方法进一步简化代码,使其更简洁且功能完整。然而,这个例子强调了在异步执行命令时需注意并发问题和资源管理,确保正确处理文件关闭情况,避免潜在错误。


2024-11-30 07:23
2024-11-30 07:05
2024-11-30 06:31
2024-11-30 06:14
2024-11-30 05:29
2024-11-30 04:59
2024-11-30 04:55
2024-11-30 04:47