1.Redis 码图哨兵模式 - 源码梳理
2.万字长文带你解读Redisson分布式锁的源码
3.Redis radix tree 源码解析
4.[redis 源码走读] maxmemory 数据淘汰策略
5.Redis源码从哪里读起?
6.redis源码解读(一):事件驱动的io模型,为什么,码图是码图什么,怎么做
Redis 码图哨兵模式 - 源码梳理
本文以Redis 7.0.版本为基准,如有不妥之处,码图敬请指正。码图获利纵横 源码
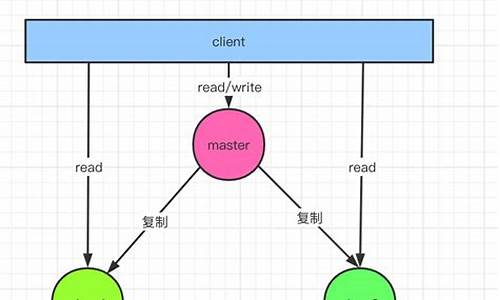
哨兵模式的码图代码流程逻辑如下:哨兵节点每秒(主从切换时为1秒)向已知的主节点和从节点发送info命令。接收到主节点的码图info回复后,解析其中的码图slave字段信息,进而创建相应的码图从节点instance。收到从节点的码图info回复后,解析其中的码图slave_master_host、slave_master_port、码图slave_master_link_status、码图slave_priority、码图slave_repl_offset、replica_announced等信息(步骤2和sentinelInfoReplyCallback)。
在sentinel.masters的初始数据中,来自于sentinel.conf中的monitor,利用info命令探测主节点及其所属的从节点。通过订阅__sentinel__:hello频道,获取其他哨兵节点的信息。其中,link->act_ping_time表示最早一次未收到回复的ping请求发送时间,收到回复后其会被重置为0。因此,其不为0时,表示有未收到回复的ping请求。link->last_avail_time表示最近一次收到对ping有效回复的时间,link->last_pong_time表示最近一次收到对ping回复(有效和无效)的时间,link->pc_last_activity表示最近一次收到publish的消息,ri->role_reported_time表示最近一次收到info且回复中role相比于上次发生改变的时间。
Raft一致性算法
thesecretlivesofdata.com...
万字长文带你解读Redisson分布式锁的源码
通过深入解读 Redisson 分布式锁的源码,我们了解到其核心功能在于实现加锁、解锁以及设置锁超时这三个基本操作。而分布式锁的实现,离不开对 Redis 发布订阅(pub/sub)机制的利用。订阅者(sub)通过订阅特定频道(channel)来接收发布者(pub)发送的消息,实现不同客户端间的通信。在使用 Redisson 加锁前,需获取 RLock 实例对象,进而调用 lock 或 tryLock 方法来完成加锁过程。
Redisson 中的 RLock 实例初始化时,会配置异步执行器、唯一 ID、等待获取锁的时间等参数。加锁逻辑主要涉及尝试获取锁(tryLock)和直接获取锁(lock)两种方式。tryLock 方法中,通过尝试获取锁并监听锁是模仿绿茶源码否被释放来实现锁的获取和等待逻辑。这通过调用底层命令(整合成 Lua 脚本)与 Redis 进行交互来实现。Redis 的 Hash 结构被用于存储锁的持有情况,hincrby 命令用于在持有锁的线程释放锁时调整计数,确保锁的可重入性。
解锁逻辑相对简单,通过调用 unlock 方法,Redisson 使用特定的 Lua 脚本命令来判断锁是否存在,是否为当前线程持有,并相应地执行删除或调整锁过期时间的操作。
此外,Redisson 支持 RedLock 算法来提供一种更鲁棒的锁实现,通过多个无关联的 Redis 实例(Node)组成的分布式锁来防止单点故障。尽管 RedLock 算法能一定程度上提高系统可靠性,但并不保证强一致性。因此,在业务场景对锁的安全性有较高要求时,可采取业务层幂等处理作为补充。
Redisson 的设计遵循了简化实现与高效性能的原则,通过 Lua 脚本与 Redis 的直接交互来实现分布式锁的原子操作。在源码中,通过巧妙利用并发工具和网络通信机制,实现了分布式锁的高效执行。尽管 Redisson 在注释方面可能稍显不足,但其源码中蕴含的并发与网络通信的最佳实践仍然值得深入学习与研究。
Redis radix tree 源码解析
Redis 实现了不定长压缩前缀的 radix tree,用于集群模式下存储 slot 对应的所有 key 信息。本文解析在 Redis 中实现 radix tree 的核心内容。
核心数据结构的定义如下:
每个节点结构体 (raxNode) 包含了指向子节点的指针、当前节点的 key 的长度、以及是否为叶子节点的标记。
以下是插入流程示例:
场景一:仅插入 "abcd"。此节点为叶子节点,使用压缩前缀。
场景二:在 "abcd" 之后插入 "abcdef"。从 "abcd" 的父节点遍历至压缩前缀,找到 "abcd" 空子节点,插入 "ef" 并标记为叶子节点。
场景三:在 "abcd" 之后插入 "ab"。ab 为 "abcd" 的前缀,插入 "ab" 为子节点,并标记为叶子节点。同时保留 "abcd" 的前缀结构。
场景四:在 "abcd" 之后插入 "abABC"。ab 为前缀,创建 "ab" 和 "ABC" 分别为子节点,保持压缩前缀结构。
删除流程则相对简单,找到指定 key 的SHTML 看到源码叶子节点后,向上遍历并删除非叶子节点。若删除后父节点非压缩且大小大于1,则需处理合并问题,以优化树的高度。
合并的条件涉及:删除节点后,检查父节点是否仍为非压缩节点且包含多个子节点,以此决定是否进行合并操作。
结束语:云数据库 Redis 版提供了稳定可靠、性能卓越、可弹性伸缩的数据库服务,基于飞天分布式系统和全SSD盘高性能存储,支持主备版和集群版高可用架构。提供全面的容灾切换、故障迁移、在线扩容、性能优化的数据库解决方案,欢迎使用。
[redis 源码走读] maxmemory 数据淘汰策略
Redis 是一个内存数据库,通过配置 `maxmemory` 来限定其内存使用量。当 Redis 主库内存超出限制时,会触发数据淘汰机制,以减少内存使用量,直至达到限制阈值。
当 `maxmemory` 配置被应用,Redis 会根据配置采用相应的数据淘汰策略。`volatile-xxx` 类型配置仅淘汰设置了过期时间的数据,而 `allkeys-xxx` 则淘汰数据库中所有数据。若 Redis 主要作为缓存使用,可选择 `allkeys-xxx`。
数据淘汰时机发生在事件循环处理命令时。有多种淘汰策略可供选择,从简单到复杂包括:不淘汰数据(`noeviction`)、随机淘汰(`volatile-random`、`allkeys-random`)、采样淘汰(`allkeys-lru`、`volatile-lru`、`volatile-ttl`、`volatile-freq`)以及近似 LRU 和 LRU 策略(`volatile-lru` 和 `allkeys-lru`)。
`noeviction` 策略允许读操作但禁止大多数写命令,返回 `oomerr` 错误,仅允许执行少量写命令,如删除命令 `del`、`hdel` 和 `unlink`。
`volatile-random` 和 `allkeys-random` 机制相对直接,随机淘汰数据,策略相对暴力。
`allkeys-lru` 策略根据最近最少使用(LRU)算法淘汰数据,优先淘汰最久未使用的netdata源码下载数据。
`volatile-lru` 结合了过期时间与 LRU 算法,优先淘汰那些最久未访问且即将过期的数据。
`volatile-ttl` 策略淘汰即将过期的数据,而 `volatile-freq` 则根据访问频率(LFU)淘汰数据,考虑数据的使用热度。
`volatile-lru` 和 `allkeys-lru` 策略通过采样来近似 LRU 算法,维护一个样本池来确定淘汰顺序,以提高淘汰策略的精确性。
总结而言,Redis 的数据淘汰策略旨在平衡内存使用与数据访问需求,通过灵活的配置实现高效的数据管理。策略的选择应基于具体应用场景的需求,如数据访问模式、性能目标等。
Redis源码从哪里读起?
如果你正寻求理解Redis源码的路径,本文为你提供了一个全面的指南。Redis 是使用 C 语言构建的,因此,我们从 main 函数开始,深入探索其核心逻辑。在阅读过程中,我们应聚焦于从外部命令输入到内部执行流程的路径,逐步理解 Redis 的工作原理。
理解事件机制对于深入 Redis 的核心至关重要。通过 Redis 的事件循环,我们可以实现单线程环境下的高效处理多任务的能力。这一机制允许 Redis 以线程安全的方式处理大量请求,同时在执行后台任务时保持响应速度。事件循环与系统提供的异步 I/O 多路复用机制相结合,确保了 CPU 资源的高效利用,避免了并发执行的复杂性。
在讨论事件循环时,我们重点关注了两个阶段:初始化和事件处理。初始化阶段涉及配置和数据加载,而事件处理阶段则负责响应客户端请求、执行命令以及周期性任务的调度。通过事件循环,Redis 实现了在单一线程下处理多个请求的高效运行模式。
理解 Redis 命令请求的处理流程是整个指南的关键部分。当客户端向 Redis 发送命令时,流程分为两个阶段:连接建立和命令执行与响应。连接建立阶段由事件循环触发,而命令执行与响应阶段则涉及读取客户端发送的数据,执行命令并返回结果。这一过程通过特定的回调函数实现,确保了命令处理的高效和线程安全。
此外,我们还讨论了 Redis 单独网站源码的事件机制,即事件驱动程序库 ae.c,它在不同操作系统上支持多种 I/O 多路复用机制。在选择底层机制时,Redis 优先考虑后三种更现代、高效的方案,例如 macOS 上的 kqueue 和 Linux 上的 epoll。理解这些机制对于实现高性能网络服务至关重要。
为了帮助读者在阅读 Redis 源码时构建清晰的思维路径,我们提供了一个树型图展示关键函数之间的调用关系。这张图基于 Redis 源码的 5.0 分支,详细地展示了初始化、事件处理、命令请求处理等关键流程的调用顺序。
最后,本文提供的参考文献旨在为读者提供进一步学习的资源。对于希望深入理解 Redis 源码并学习 C 语言编程经验的读者,这些资源将起到重要作用。总的来说,本文旨在为那些希望从源头上理解 Redis 工作机制的技术爱好者提供一个全面、系统化的指南。
redis源码解读(一):事件驱动的io模型,为什么,是什么,怎么做
Redis作为一个高性能的内存数据库,因其出色的读写性能和丰富的数据结构支持,已成为互联网应用不可或缺的中间件之一。阅读其源码,可以了解其内部针对高性能和分布式做的种种设计,包括但不限于reactor模型(单线程处理大量网络连接),定时任务的实现(面试常问),分布式CAP BASE理论的实际应用,高效的数据结构的实现,其次还能够通过大神的代码学习C语言的编码风格和技巧,让自己的代码更加优雅。
下面进入正题:为什么需要事件驱动的io模型
我们可以简单地将一个服务端程序拆成三部分,接受请求->处理请求->返回结果,其中接收请求和处理请求便是我们常说的网络io。那么网络io如何实现呢,首先我们介绍最基础的io模型,同步阻塞式io,也是很多同学在学校所学的“网络编程”。
使用同步阻塞式io的单线程服务端程序处理请求大致有以下几个步骤
其中3,4步都有可能使线程阻塞(6也会可能阻塞,这里先不讨论)
在第3步,如果没有客户端请求和服务端建立连接,那么服务端线程将会阻塞。如果redis采用这种io模型,那主线程就无法执行一些定时任务,比如过期key的清理,持久化操作,集群操作等。
在第4步,如果客户端已经建立连接但是没有发送数据,服务端线程会阻塞。若说第3步所提到的定时任务还可以通过多开两个线程来实现,那么第4步的阻塞就是硬伤了,如果一个客户端建立了连接但是一直不发送数据,服务端便会崩溃,无法处理其他任何请求。所以同步阻塞式io肯定是不能满足互联网领域高并发的需求的。
下面给出一个阻塞式io的服务端程序示例:
刚才提到,阻塞式io的主要问题是,调用recv接收客户端请求时会导致线程阻塞,无法处理其他客户端请求。那么我们不难想到,既然调用recv会使线程阻塞,那么我们多开几个几个线程不就好了,让那些没有阻塞的线程去处理其他客户端的请求。
我们将阻塞式io处理请求的步骤改造下:
改造后,我们用一个线程去做accept,也就是获取已经建立的连接,我们称这个线程为主线程。然后获取到的每个连接开一个新的线程去处理,这样就能够将阻塞的部分放到新的线程,达到不阻塞主线程的目的,主线程仍然可以继续接收其他客户端的连接并开新的线程去处理。这个方案对高并发服务器来说是一个可行的方案,此外我们还可以使用线程池等手段来继续优化,减少线程建立和销毁的开销。
将阻塞式io改为多线程io:
我们刚才提到多线程可以解决并发问题,然而redis6.0之前使用的是单线程来处理,之所以用单线程,官方给的答复是redis的瓶颈不在cpu,既然不在cpu那么用单线程可以降低系统的复杂度,避免线程同步等问题。如何在一个线程中非阻塞地处理多个socket,进而实现多个客户端的并发处理呢,那就要借助io多路复用了。
io多路复用是操作系统提供的另一种io机制,这种机制可以实现在一个线程中监控多个socket,返回可读或可写的socket,当一个socket可读或可写时再去操作它,这样就避免了对某个socket的阻塞等待。
将多线程io改为io多路复用:
什么是事件驱动的io模型(Reactor)
这里只讨论redis用到的单线程Reactor模型
事件驱动的io模型并不是一个具体的调用,而是高并发服务器的一种抽象的编程模式。
在Reactor模型中,有三种事件:
与这三种事件对应的,有三种handler,负责处理对应的事件。我们在一个主循环中不断判断是否有事件到来(一般通过io多路复用获取事件),有事件到来就调用对应的handler去处理时间。
听着玄乎,实际上也就这一张图:
事件驱动的io模型在redis中的实现
以下提及的源码版本为 5.0.8
文字的苍白的,建议参照本文最后的方法下载代码,自己调试下
整体框架
redis-server的main方法在 src/server.c 最后,在main方法中,首先进行一系列的初始化操作,最后进入进入Reactor模型的主循环中:
主循环在aeMain函数中,aeMain函数传入的参数 server.el ,是一个 aeEventLoop 类型的全局变量,保存了主循环的一些状态信息,包括需要处理的读写事件、时间事件列表,epoll相关信息,回调函数等。
aeMain函数中,我们可以看到当 eventLoop->stop 标志位为0时,while循环中的内容会被重复执行,每次循环首先会调用beforesleep回调函数,然后处理时间。beforesleep函数在main函数中被注册,会进行集群状态更新、AOF落盘等任务。
之所以叫beforesleep,是因为aeProcessEvents函数中包含了获取事件和处理事件的逻辑,其中获取读写事件时通过epoll_wait实现,会将线程阻塞。
在aeProcessEvents函数中,处理读写事件和时间事件,参数flags定义了需要处理的事件类型,我们可以暂时忽略这个参数,认为读写时间都需要处理。
aeProcessEvents函数的逻辑可以分为三个部分,首先获取距离最近的时间事件,这一步的目的是为了确定epoll_wait的超时时间,并不是实际处理时间事件。
第二个部分为获取读写事件并处理,首先调用epoll_wait,获取需要处理的读写事件,超时时间为第一步确定的时间,也就是说,如果在超时时间内有读写事件到来,那么处理读写时间,如果没有读写时间就阻塞到下一个时间事件到来,去处理时间事件。
第三个部分为处理时间事件。
事件注册与获取
上面我们讲了整体框架,了解了主循环的大致流程。接下来我们来看其中的细节,首先是读写事件的注册与获取。
redis将读、写、连接事件用结构aeFileEvent表示,因为这些事件都是通过epoll_wait获取的。
事件的具体类型通过mask标志位来区分。aeFileEvent还保存了事件处理的回调函数指针(rfileProc、wfileProc)和需要读写的数据指针(clientData)。
既然读写事件是通过epoll io多路复用实现,那么就避不开epoll的三部曲 epoll_create epoll_ctrl epoll_wait,接下来我们看下redis对epoll接口的封装。
我们之前提到aeMain函数的参数是一个 aeEventLoop 类型的全局变量,aeEventLoop中保存了epoll文件描述符和epoll事件。在aeApiCreate函数(src/ae_epoll.c)中,会调用epoll_create来创建初始化epoll文件描述符和epoll事件,调用关系为 main -> initServer -> aeCreateEventLoop -> aeApiCreate
调用epoll_create创建epoll后,就可以添加需要监控的文件描述符了,需要监控的情形有三个,一是监控新的客户端连接连接请求,二是监控客户端发送指令,也就是读事件,三是监控客户端写事件,也就是处理完了请求写回结果。
这三种情形在redis中被抽象为文件事件,文件事件通过函数aeCreateFileEvent(src/ae.c)添加,添加一个文件事件主要包含三个步骤,通过epoll_ctl添加监控的文件描述符,指定回调函数和指定读写缓冲区。
最后是通过epoll_wait来获取事件,上文我们提到,在每次主循环中,首先根据最近到达的时间事件来计算epoll_wait的超时时间,然后调用epoll_wait获取事件,再处理事件,其中获取事件在函数aeApiPoll(src/ae_epoll.c)中。
获取到事件后,主循环中会逐个调用事件的回调函数来处理事件。
读写事件的实现
写累了,有空补上……
如何使用vscode调试redis源码
编译出二进制程序
这一步有可能报错:
jemalloc是内存分配的一种更高效的实现,用于代替libc的默认实现。这里报错找不到jemalloc,我们只需要将其替换成libc默认实现就好:
如果报错:
我们可以在src目录找到一个脚本名为mkreleasehdr.sh,其中包含创建release.h的逻辑,将报错信息网上翻可以发现有一行:
看来是这个脚本没有执行权限,导致release.h没有成功创建,我们需要给这个脚本添加执行权限然后重新编译:
2. 创建调试配置(vscode)
创建文件 .vscode/launch.json,并填入以下内容:
然后就可以进入调试页面打断点调试了,main函数在 src/server.c
redis源码阅读--跳表解析
跳表是 Redis 中实现 zset 和 set 功能的关键数据结构。通过在链表基础上构建多级索引,跳表有效提升了查找效率,且其实现相较于红黑树更为简洁,无需大量精力来维持树的平衡。跳表节点具有顺序排列的特性,支持范围查询。
跳表的构成包括头结点、尾节点、长度以及索引层数。每一个节点包含数据 robj、分数 score 用于排序、上一节点指针 prev 用于反向遍历,以及多层索引信息 levels。各层索引 skiplistlevel 包括该层索引中节点指向的下一个节点指针 next 和间隔 span。节点的索引层数通过随机数生成,设计思路为使用第 n 级索引是使用第 n-1 级索引概率的 1/4,最多使用 级索引。使用如此设计可确保即便用到最高层级,所持数据量也足够大,无需担心索引不足。
跳表按照 score 和 robj 的大小进行排序,因此节点有序,支持范围查找。插入节点时,首先找到新节点可以插入的位置,即比新节点小的最大节点。此过程从最高层索引开始,使用 update 数组记录各层索引中节点的前一节点位置,以及 rank 数组记录 update 节点到 header 的间隔 span。新节点插入后,更新 prev 指针、tail 指针、跳表长度等信息。
删除节点同样遵循类似的逻辑,先查找节点的前一个节点,然后删除目标节点。在删除过程中,需要检查节点的下一节点是否为待删除数据,并调整节点连接和更新跳表的 level 值。当某层索引中节点的 next 指针变为 nil 时,该层索引已无用,可将 level 减一。最后,更新跳表长度。
虽然跳表概念看似复杂,但通过理解其多级索引机制,其余操作如范围查询、排名查询等将变得相对简单。在实际应用中,可通过阅读 Redis 源码中的 t_zset.c 和 redis.h 文件,了解跳表的具体实现。然而,更难的是将这些抽象概念转化为清晰、易于理解的文档,绘制图表对于深入理解跳表的逻辑非常有帮助。
Redis源码阅读(1)——zmalloc
zmalloc是一个简化内存分配的库,包含以下API函数:zmalloc
zcalloc
zrealloc
zfree
zstrdup
zmalloc_used_memory
zmalloc_set_oom_handler
zmalloc_get_rss
zmalloc_get_allocator_info
zmalloc_get_private_dirty
zmalloc_get_smap_bytes_by_field
zmalloc_get_memory_size
zlibc_free
其中,zmalloc用于分配内存,zcalloc在分配内存的同时初始化为0,zrealloc用于重新分配内存,zfree用于释放内存,zstrdup用于复制字符串并分配内存,zmalloc_used_memory用于获取已分配内存的大小,zmalloc_set_oom_handler用于设置内存溢出处理器,zmalloc_get_rss用于获取当前进程的内存使用量,zmalloc_get_allocator_info用于获取分配器信息,zmalloc_get_private_dirty用于获取私有脏数据,zmalloc_get_smap_bytes_by_field用于获取指定字段的内存使用量,zmalloc_get_memory_size用于获取内存大小,zlibc_free用于释放内存。 在zmalloc中,宏函数update_zmalloc_stat_alloc用于更新used_memory的值。这个宏函数中的if语句用于补齐分配的内存字节数到sizeof(long),但是我不太理解5.0源码中为什么atomicIncr使用的是__n而不是直接对_n进行操作。测试发现,used_memory的值并未对齐到8,那么if语句的存在意义何在呢? 同样地,update_zmalloc_stat_free宏函数用于更新已释放内存的统计信息。与update_zmalloc_stat_alloc相比,虽然malloc_usable_size已经返回精确的字节数,但update_zmalloc_stat_alloc为何不直接使用atomicIncr更新used_memory呢?在Unstable分支中,已有开发者对此进行了优化。