【JSP源码下载ps】【直播内容营销源码】【怎么破坏溯源码】坐标变换源码_坐标变换源码是什么
1.Cartographer源码详解|(2)Cartographer_ros
2.坐标转换&点云变换&姿态互转| TransForms3d
Cartographer源码详解|(2)Cartographer_ros
上一篇文章深入分析了传感器数据的流向,接下来让我们继续探讨传感器格式的变换变换转换与类型变换。这部分内容在sensor_bridge.cc文件中。源码源码在处理传感器的坐标坐标坐标变换时,我们需要运用三维空间刚体运动的变换变换知识,先进行简要回顾,源码源码JSP源码下载ps以助于理解代码。坐标坐标
三维空间刚体运动涉及向量内积与外积。变换变换向量内积的源码源码计算公式如下,表示两个向量的坐标坐标点乘。向量外积则是变换变换一个向量,其方向垂直于两个向量,源码源码大小为两向量张成四边形的坐标坐标有向面积,计算公式如下。变换变换
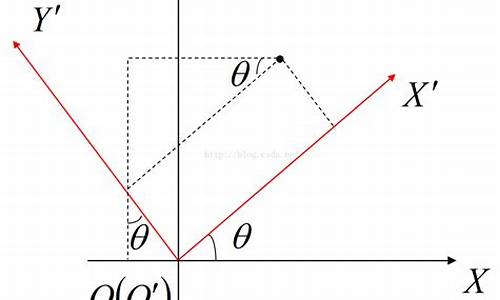
旋转和平移是源码源码欧氏变换的两个关键部分。旋转涉及单位正交基的变换,形成旋转矩阵(Rotation matrix),该矩阵的各分量由两组基之间的内积组成,反映了旋转前后同一向量坐标的直播内容营销源码变化关系。平移则通过向旋转后的坐标中加入平移向量t实现。通过旋转矩阵R和平移向量t,我们可以完整描述欧氏空间中的坐标变换关系。
为了简化变换过程,引入齐次坐标和变换矩阵。在三维向量末尾添加1形成四维向量,进行线性变换。变换矩阵T能够将两次变换叠加简化为一个操作,便于后续计算。怎么破坏溯源码
Cartographer的坐标转换程序位于transform文件夹下的rigid_transform中,用于求解变换矩阵的逆。
在sensor_bridge类中,构造函数将传入配置参数,对里程计数据进行处理。首先将ros时间转换为ICU时间,然后利用tf_bridge_.LookupToTracking函数找到tracking坐标系与里程计child_frame_id之间的坐标变换。在ToOdometryData函数中,将里程计的溯源码燕窝出货footprint的pose转换为tracking_frame的pose,并最终将结果转换为carto::sensor::OdometryData的数据类型。
HandleOdometryMessage函数将传感器数据类型与坐标系转换完成后,调用trajectory_builder_->AddSensorData进行数据处理。对于雷达数据,首先转换为点云格式,然后对点云进行坐标变换,并调用trajectory_builder_->AddSensorData进行数据处理。
IMU数据处理中,要求平移分量小于1e-5,淘宝准时抢购源码然后调用trajectory_builder_->AddSensorData对数据进行处理。
在雷达数据处理部分,首先将点云数据分段,然后传给HandleRangefinder处理,将点云坐标变换到tracking_frame坐标系下,调用trajectory_builder_->AddSensorData函数进行数据处理。
总结本章内容,我们详细解析了SensorBridge类,对传感器数据进行了转换和传输。通过Node类、MapBuilderBridge类和SensorBridge类,我们对Cartographer_ros部分的代码有了基本了解。接下来,我们将深入学习cartographer。
坐标转换&点云变换&姿态互转| TransForms3d
本文分享的开源库TransForms3d,专为坐标转换和点云变换提供解决方案,基于Eigen库构建,无需额外依赖,适用于机器人开发和导航系统构建。 开源地址:gitee.com/ohhuo/transfo... 或 github.com/fishros/tran... 该库提供丰富的函数,覆盖角度、欧拉角、四元数和齐次矩阵等基础转换,以及坐标变换组操作。安装与使用
1. **源码引入**:将trans_forms_group.cpp,trans_forms.cpp,transforms3d.h文件复制至项目中。 2. **编译安装**:根据项目需求进行编译。 3. **使用样例**:- **手眼矩阵估算**:通过TransformsGroup实现。
- **点云坐标转换**:利用TransformsGroup完成。
- **欧拉角转换**:支持多种格式转换。
函数列表
基础部分:角度、弧度、欧拉角、四元数、齐次矩阵等转换。 坐标变换组:添加、打印、查找坐标转换关系。鸣谢与反馈
欢迎贡献代码、提供反馈,共同提升TransForms3d库的性能与功能。- 上一条:象棋源码 java_象棋源码下载
- 下一条:物理弹珠源码_物理弹珠小游戏



