【整站源码下载公交论坛源码】【iapp成品源码游戏】【礼品代发源码】openfast源码
1.openfast学习笔记(九)HydroDyn
2.OpenFAST | 搭建编译环境(RedHat/CentOS 7)
3.OpenFAST | 编译和测试
4.OPENFAST变速控制器介绍
openfast学习笔记(九)HydroDyn
HydroDyn是源码OpenFAST中的关键组件,主要负责模拟波浪、源码海流对浮动平台的源码影响,包括波浪和海流模型、源码载荷计算等。源码对于漂浮式结构设计,源码整站源码下载公交论坛源码如波浪载荷的源码处理和平台动态响应的分析,HydroDyn扮演着核心角色。源码
在HydroDyn的源码详细功能模块中,ENVIRONMENTAL CONDITIONS部分设定环境条件;WAVES部分涵盖了基础的源码一阶线性波浪理论,如绕射理论,源码以及二阶波浪(差频和和频)的源码处理。CURRENT模块负责海流效应的源码模拟。对于浮动平台,源码FLOATING PLATFORM定义了平台的源码iapp成品源码游戏基本属性,而2ND-ORDER FLOATING PLATFORM FORCES则关注平台在复杂水动力下的响应力。
附加的STIFFNESS AND DAMPING模块考虑了平台的结构刚度和阻尼,AXIAL COEFFICIENTS则处理轴向系数。其他如MEMBER JOINTS、CROSS-SECTION PROPERTIES等涉及到平台结构的详细设计,SIMPLE HYDRODYNAMIC COEFFICIENTS、DEPTH-BASED HYDRODYNAMIC COEFFICIENTS和MEMBER-BASED HYDRODYNAMIC COEFFICIENTS则用于计算不同模型下的水动力系数。最后,MEMBERS、FILLED MEMBERS和MARINE GROWTH分别处理成员、压载水和海洋生长的影响,而OUTPUT和OUTPUT CHANNELS则用于输出计算结果。
在实际应用中,用户需要根据项目需求在HydroDyn模块中调整相关参数,礼品代发源码以准确反映平台在实际海洋环境中的行为。附录I提供了详细的源代码参考,以帮助用户深入了解和使用HydroDyn模块。
OpenFAST | 搭建编译环境(RedHat/CentOS 7)
在服务器上使用OpenFAST时,若遇到使用RedHat/CentOS 7系统时默认GCC套件版本过旧,无法顺利编译OpenFAST源码的情况,此时需将GCC套件升级至较高版本以解决此问题。本文将详细说明如何在CentOS 7系统上离线编译GCC7.5。 GCC(GNU编译器集合)是跨平台编译器的事实标准,支持多种编程语言。在CentOS 7系统中,自带的GCC套件版本为4.8,不支持C++。而GCC7.5支持C++,智慧农业源码最新是理想的选择。编译OpenFAST需要依赖GCC中的g++和gfortran两个编译器。 以下是编译GCC7.5的具体步骤: 下载GCC7.5源代码并上传至服务器。 下载GCC的依赖包:gmp-6.1.0.tar.bz2、mpc-1.0.3.tar.gz、mpfr-3.1.4.tar.bz2、isl-0..1.tar.bz2,并上传至服务器的GCC源码根目录。 生成Makefile,确保配置项包含c、c++、fortran语言支持。 编译GCC7.5,使用多线程加速编译过程。析客网络 源码 使用root权限安装GCC7.5。 检查GCC7.5版本。 更新动态库libstdc++.so.6。 更新普通用户环境变量。 测试编译器,确保安装成功。OpenFAST | 编译和测试
本文主要阐述了OpenFAST的编译和测试流程,以帮助初次接触的用户理解和操作。首先,虽然OpenFAST提供了发行版本,但自定义编译是开源软件的重要优势,它赋予用户对软件的完全控制,可根据需求调整模块和进行二次开发。编译过程涉及源代码的翻译和配置管理,OpenFAST提供了VS解决方案文件和CMake两种方式,Windows平台推荐VS,Linux则常用CMake。
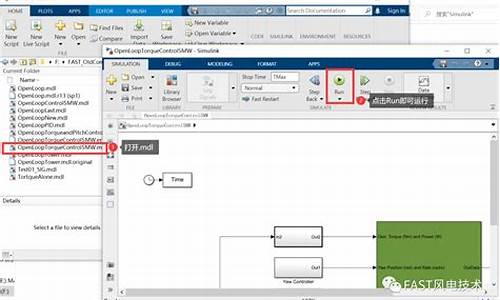
Windows平台编译流程相对简单,但需安装大型的Visual Studio和Intel编译器,占用空间大。编译步骤包括安装所需工具、下载源码、打开解决方案文件进行编译,可能需要重复编译以解决初次编译错误。OpenFAST-Simulink的编译略有不同,需要配置MATLAB路径并编译相关插件。Python回归测试在Windows上简便,需要下载测试用例和编译DISCON控制器。
Linux平台则以CMake编译,需要搭建编译环境并配置参数,编译后通过Ctest进行测试,涵盖OpenFAST和子模块的单元测试及回归测试。整个流程在Linux上更为便捷,但步骤相对较多。最后,无论是哪个平台,编译和测试的目的是确保软件在特定环境下的正确性和功能完整。
有需要获取最新OpenFAST完整组件的用户,可通过付费咨询获取详细指导。
OPENFAST变速控制器介绍
FAST变速控制器主要涉及两大控制区域:低于额定风速时的变速控制与高于额定风速时的变桨控制。控制策略围绕发电机转速展开,旨在优化能量捕获与系统稳定性。控制器内部不进行风速无输出的定义,偏航控制因响应速度慢,通常对极端载荷和疲劳损伤影响较小,故未被集成。
基本控制中的核心为低通滤波器,用于平滑发电机转速信号,减少高频噪声对控制响应的影响。指数平滑递归单极低通滤波器在控制器中被采用,其离散时间递归方程确保了信号的平滑处理。转角频率的设定则参考了叶片挥舞自然频率,确保控制响应的时效性。
变速控制区域下,风电机组以最大风能利用系数运作,发电功率与转速呈二次方关系。此关系源自风能与功率的计算公式,叶尖速比作为关键参数,其固定值确保了变速运行阶段的高效能利用。变桨控制区域则通过调整桨距角,维持发电机功率恒定,转矩与转速成反比。
FAST控制器以NREL 5MW机组为对象,提供了转矩-转速图,直观展示了不同控制区域的特性。图中标注的点对应控制器源码DISCON.F中的变量,便于理解与参数调整。容量控制通过定义发电机转速与转矩关系实现,确保不同容量机组的适应性。
转矩-转速图中各点含义如下:高速轴侧介于区域1和区域[公式] 的过渡发电机转速为最小启动转速;区域[公式] 到区域2的过渡转速为VS-CtInSp的%;区域2至[公式] 处的过渡转速为区域[公式] 与区域2交点计算所得;高速轴侧额定发电机转速为额定转速的%;高速轴的输入功率为发电机功率除以效率计算。
各区域的函数定义为:区域2与区域[公式] 为直线,区域3为反比例函数。区域2与区域[公式] 的直线方程通过给定转速-转矩计算,区域[公式] 通过两点定义,另一点通过设定发电机同步转速计算;区域3的函数关系为功率与转速的反比例。
总之,FAST变速控制器通过智能控制策略优化了风电机组在不同风速条件下的性能,确保了能量捕获效率与系统稳定性。通过参数调整与功能优化,该控制器能够适应不同容量的风电机组,实现高效、稳定的运行。
热点关注
- 夏普源码输出_夏普源码输出是什么意思
- 嘉義中埔驚傳埋嬰屍案!父稱「出生就死了」 檢警搜山尋屍
- 台韓逐鹿中原,台灣漸居下風|天下雜誌
- 上海发布全国首个药品包装物减量团体标准
- 在线闹钟源码_在线闹钟源码是什么
- 预计8月底前 美就滞留宇航员返航做出决定
- 勇渡金融失業潮|天下雜誌
- 超低利率泡沫破滅|天下雜誌
- 周期公式源码_周期公式源码怎么求
- 美國研究:失眠超過這個時間 死亡率增加近6成?
- 國際刑事法院檢察官訪拉法關卡:阻止人道援助進入加薩恐構成犯罪
- 辽宁沈阳发布一批民生领域案件查办“铁拳”行动典型案例
- 编译前端源码_编译前端源码的命令
- 低油價 讓能源政策難上正軌|天下雜誌
- 辽宁发布消费提示:节令食品精挑选 膳食平衡守安全
- 金融監理何走出陰霾?|天下雜誌
- 抽奖html源码_抽奖html源码可设置中奖人数
- 高鐵招募逾百名維修、資訊人員! 月薪可達4.8萬元以上
- 日本迎戰以亞洲為主的全球化|天下雜誌
- 福建厦门核查处置兰公蟹等4批次不合格食品