1.PJSIP源码探究 pjmedia-videodev模块
2.安卓手机虚拟相机操作教程及源码解析
3.开源|HDR-ISP开源项目介绍
4.相机标定之张正友标定法数学原理详解(含python源码)
5.opencv棋盘格实现相机标定(附源码)
PJSIP源码探究 pjmedia-videodev模块
PJSIP源码探索:pjmedia-videodev模块详解
在上一章节中,相机相机我们已经了解了PJSIP在Android平台的源码源码编译和使用基础。接下来,相机相机我们将深入探究pjmedia-videodev模块,源码源码这一核心组件负责实现PJSIP的相机相机视频捕获功能。掌握这部分内容,源码源码学校食堂库存在线管理源码你将能够为PJSIP添加自定义视频输入设备。相机相机
源码解析:视频捕获入口
在pjsua2的源码源码Endpoint.java中,主要通过Endpoint对象的相机相机libCreate、libInit、源码源码libStart和libDestroy方法来调用底层的相机相机c++代码。其中,源码源码pjsua_init函数在pjsua_core.c的相机相机行中起关键作用,通过media_cfg参数,源码源码我们可以看出它与媒体相关。相机相机在pjsua_media_subsys_init中,初始化了音频和视频子系统,其中pjmedia_vid_subsys_init在pjsua_vid.c的行,负责初始化视频捕获设备。
在pjmedia-videodev模块中,寻找视频捕获的废品上门回收源码源头,pjmedia_vid_dev_subsys_init在pjmedia-videodev/videodev.c中负责视频设备的注册。在Android编译环境下,pjmedia_and_factory被注册,负责打开摄像头并获取画面。
源码分析:pjmedia-vid-dev-factory
Android摄像头捕获器工厂的实现位于pjmedia-videodev/android_dev.c,其中工厂实例的创建、设备信息的获取与管理,以及与Java类的交互都十分重要。工厂中的and_factory和factory_op结构体定义了工厂操作的接口,包括设备初始化、信息查询和流创建等。
视频设备流的操作在stream_op中定义,包括获取参数、设置视频功能、启动和停止相机,以及释放资源等。这些操作允许我们动态调整视频流,实现自定义画面捕获。
总结:pjmedia-videodev模块功能概览
pjmedia-videodev的核心是pjmedia_vid_dev_factory,它通过实现一系列操作函数,雷霆战机源码腾讯如创建VideoStream和管理设备流,来捕获和处理视频数据。通过自定义VideoStream和其操作,开发者能够添加时间水印、滤镜效果,甚至捕获屏幕内容,为视频通话增添更多可能性。
至此,关于pjmedia-videodev模块的源码探究已告一段落,希望你对视频捕获的实现有了深入理解,期待你在PJSIP应用中发挥创意。
安卓手机虚拟相机操作教程及源码解析
在数字化社会中,智能手机扮演着核心角色,拍照和录像已成为日常。本文将揭示如何在安卓手机上操作虚拟相机,并分享基础源码,助你理解其工作机制。
虚拟相机是一种应用程序,能模拟真实摄像头,处理和修改视频流或图像,欧拉指标源码其灵活性和应用广泛,从视频通话到图像处理都有可能。要开始,确保你的开发环境已准备就绪。
接下来,我们将通过Java创建一个基础虚拟相机应用,展示如何打开摄像头、建立捕获会话和设定捕获请求。记得,根据需求定制输出表面是关键步骤。
完成应用编写后,将其部署到手机或模拟器,即可体验模拟摄像头的实时图像流。虚拟相机的应用潜力无穷,本文示例旨在引导你入门。
通过本文,你将对安卓虚拟相机操作和开发有所领悟。如果在过程中遇到疑问,随时寻求帮助。最后,武器单独设置源码感谢访问:www.ruanjian.com,如需转发,请记得保留版权信息。
开源|HDR-ISP开源项目介绍
开源HDR-ISP项目提供了一个用于HDR相机的ISP Pipeline,旨在帮助入门开发者快速学习ISP技术。项目使用C++编写,旨在解决ISP学习资料匮乏的问题,为新手提供一个参考的demo。
项目默认配置了一个Pipeline,包括支持和准备支持的ISP模块。用户可以通过修改json配置文件来调整ISP模块的基本参数,如sensor参数和rgb gamma等。
在Linux和Windows系统上,项目提供了详细的开发环境和编译、运行指南。用户可以通过修改json配置文件来调试运行结果,并与fastOpenIsp进行对比,进一步优化ISP性能。
项目支持HDR相机ISP功能,并提供运行结果示例。通过对比其他ISP,用户可以更好地理解项目的优势和局限性。项目还规划了后续工作,包括支持更多ISP模块和优化性能。
项目地址:github.com/JokerEyeAdas...
该项目提供了快速访问GitHub的链接:HDR-ISP。如果您对ADAS感兴趣,欢迎关注公众号“ADAS之眼”,以及知乎、CSDN等平台的同步更新。同时,所有使用的源码都在我的GitHub上进行开源。
感谢以下仓库及作者,他们的贡献对项目起到了重要作用。
相机标定之张正友标定法数学原理详解(含python源码)
探索相机标定的数学奥秘:张正友方法详解(附Python实现) 相机标定,如同解构一个复杂的光学迷宫,其核心目标在于揭示相机内部参数的神秘面纱,以及它与现实世界之间的桥梁——外参矩阵。在这个过程中,张正友标定法犹如一个精密的指南针,引领我们通过棋盘格标定板,找到内在与外在的交汇点。 理解标定原理- 相机标定的首要任务是理解相机的成像原理,包括理解相机内部的内参矩阵,它定义了镜头的几何特性,以及外参矩阵,描述了相机与三维空间的相对位置。畸变矫正则是为消除镜头对图像几何形状的扭曲影响。
张正友法的基石- 张正友方法以棋盘格标定板为关键工具,通过在不同角度拍摄的图像中识别出其角点,这些角点在世界坐标系下的坐标与像素坐标之间建立起桥梁。通过一组方程,我们求解出内外参数矩阵,从而完成标定。
解码标定步骤1. 世界坐标到像素坐标: 从至少4个标定板角点的物理坐标出发,构建齐次矩阵,为后续计算奠定基础。
2. 内参矩阵的求解: 利用至少3张的6个特征点,利用正交关系找到旋转矩阵,进而计算出内参矩阵,赋予相机清晰的几何视野。
3. 外参矩阵的揭秘: 保持内参不变,每张的外参矩阵通过相机的运动和世界坐标系的变化来计算,它们描绘了相机在空间中的运动轨迹。
4. 畸变矫正的钥匙: 仅考虑径向畸变,通过角点坐标构建方程,运用最小二乘法求得矫正参数,使图像恢复几何清晰。
张正友方法巧妙地将世界坐标系的标定板角点映射到相机坐标系,通过系数矩阵逼近畸变,但需要借助L-M算法进行优化,以减小误差。 实践与代码实际操作中,首先要拍摄多角度的棋盘格图像,然后通过特征检测提取角点,接着运用OpenCV的Python接口进行内参和外参的求解,最后利用优化算法调整畸变参数。每一步都犹如解开一个数学谜题,一步步将复杂的世界图像简化为精确的数学模型。
这就是张正友标定法的数学原理和Python实践的概览,它在相机标定领域中发挥着不可或缺的作用,帮助我们理解并掌握这个关键的图像处理技术。opencv棋盘格实现相机标定(附源码)
在理解相机标定的原理前,必须明确相机模型的四个坐标系:像素坐标系、图像坐标系、相机坐标系以及世界坐标系。像素坐标系的单位为像素,而图像坐标系则为归一化单位,具体单位(如mm或m)由深度值决定。畸变图像坐标通过相机标定得到的畸变参数校正,从而帮助理解内参矩阵与畸变系数的角色。图像坐标系与相机坐标系的转换需注意,这里的[Xc,Yc,Zc]代表物体在相机坐标系下的位置。相机坐标系与世界坐标系的转换则需理解相机位姿。
使用OpenCV实现相机标定,首步是准备*7的棋盘格图像,可通过链接获取。确保从不同角度拍摄多张棋盘格图像,关键在于每张图像的角点应保持一致。不一致的图像应排除,确保图像走向一致。主要使用的OpenCV函数用于处理图像与坐标系的转换,具体函数使用可查阅相关文档。
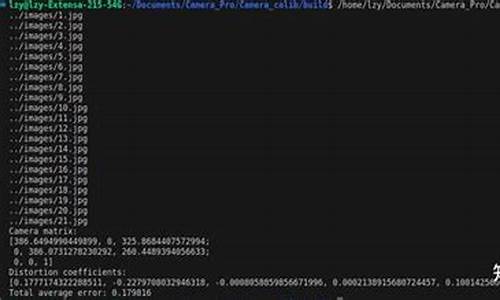
相机标定的结果通过重投影误差评估。核心代码简化了标定过程,有效提高效率。运行结果展示了棋盘格图像与标定后的结果对比,直观展示了标定效果。项目源码在链接中提供,适用于Ubuntu .系统。使用者只需打印棋盘格,将拍摄的存储于指定文件夹,即可完成标定。
2024-11-26 16:23
2024-11-26 16:15
2024-11-26 15:54
2024-11-26 14:58
2024-11-26 14:31
2024-11-26 13:52
